6DOF
Implement six-degrees-of-freedom equations of motion in simulations, using
Euler angles and quaternion representations
Model and simulate point mass and six-degrees-of-freedom dynamics of fixed or variable mass atmospheric flight vehicles. Define representations of the equations of motion in body, wind, and Earth-centered, Earth-fixed (ECEF) coordinate systems. Transform between coordinate systems and perform unit conversions to ensure model consistency.
Blocks
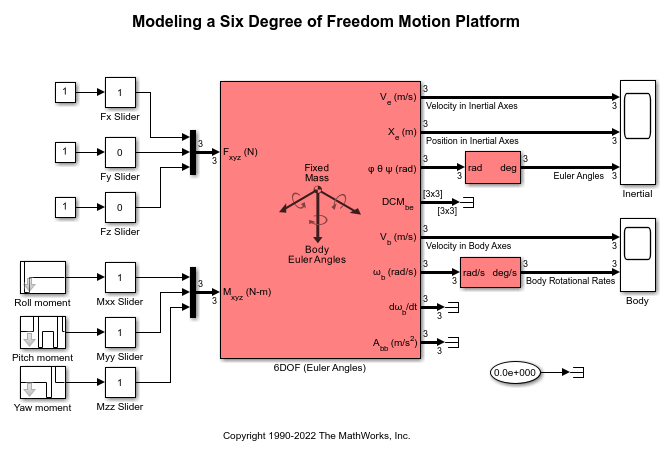
| 6DOF (Euler Angles) | Implement Euler angle representation of six-degrees-of-freedom equations of motion |
| 6DOF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion with respect to body axes |
| 6DOF ECEF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion in Earth-centered Earth-fixed (ECEF) coordinates |
| 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion with respect to wind axes |
| 6DOF Wind (Wind Angles) | Implement wind angle representation of six-degrees-of-freedom equations of motion |
| Custom Variable Mass 6DOF (Euler Angles) | Implement Euler angle representation of six-degrees-of-freedom equations of motion of custom variable mass |
| Custom Variable Mass 6DOF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass with respect to body axes |
| Custom Variable Mass 6DOF ECEF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass in Earth-centered Earth-fixed (ECEF) coordinates |
| Custom Variable Mass 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass with respect to wind axes |
| Custom Variable Mass 6DOF Wind (Wind Angles) | Implement wind angle representation of six-degrees-of-freedom equations of motion of custom variable mass |
| Simple Variable Mass 6DOF (Euler Angles) | Implement Euler angle representation of six-degrees-of-freedom equations of motion of simple variable mass |
| Simple Variable Mass 6DOF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass with respect to body axes |
| Simple Variable Mass 6DOF ECEF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass in Earth-centered Earth-fixed (ECEF) coordinates |
| Simple Variable Mass 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass with respect to wind axes |
| Simple Variable Mass 6DOF Wind (Wind Angles) | Implement wind angle representation of six-degrees-of-freedom equations of motion of simple variable mass |
Topics
- About Aerospace Coordinate Systems
Define coordinate systems to represent aircraft and spacecraft motion.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)