Coordinate Systems
Coordinate systems are an important part of aerospace systems. Use the coordinate system blocks to standardize units across your model, transform spatial representations and coordinate systems, describe the behavior of three- and six-degrees-of-motion bodies, and perform common aerospace math operations.
For example, axes transformation blocks support transformations such as those between:
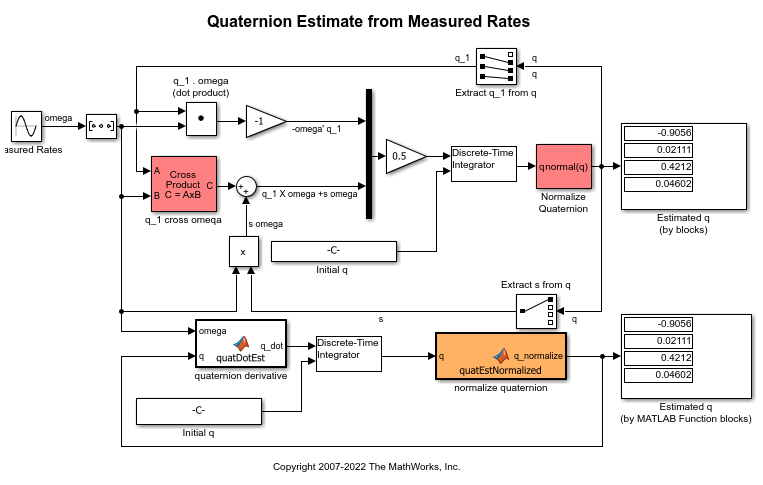
Direction cosine matrices and quaternions
Rotation angles and quaternions
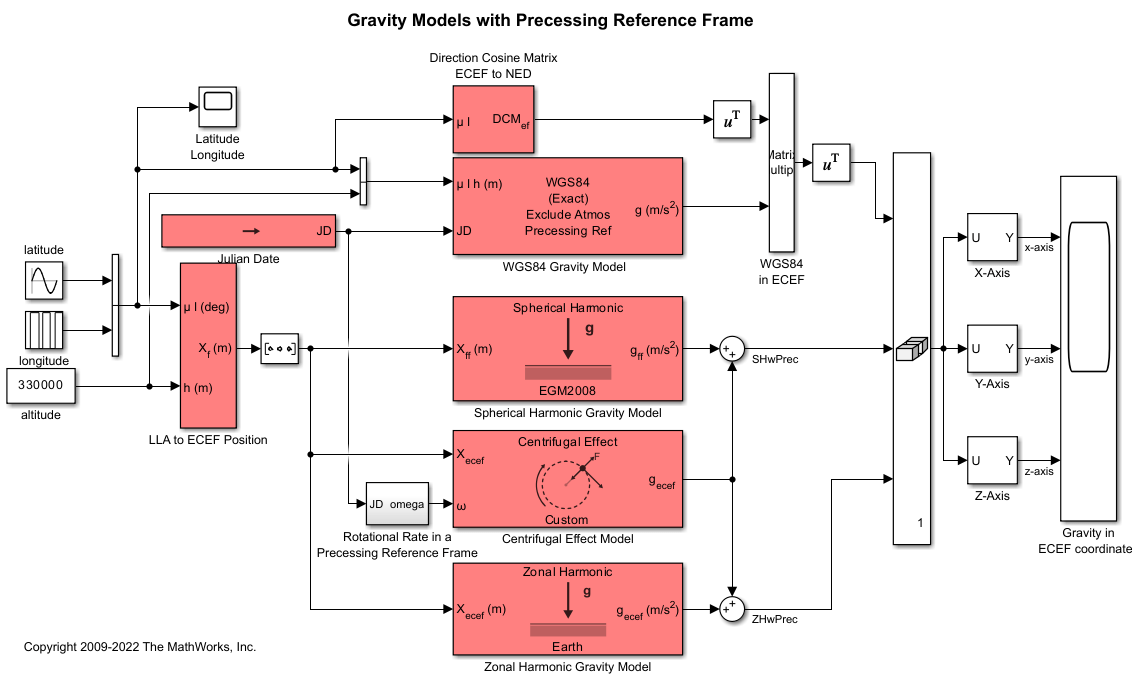
Earth-centered inertial (ECI) coordinates and azimuth or geodetic latitude, longitude, altitude (LLA) coordinates
Flat Earth positions from geodetic latitude, longitude, and altitude
For an overview of coordinate systems, see About Aerospace Coordinate Systems.
Frequently Viewed Topics
Categories
- Axes Transformations
Transform axes of coordinate systems to different types, such as Euler angles to quaternions
- Equations of Motion
Implement 3DoF, 6DoF, and point mass equations of motion to determine body position, velocity, attitude, related values
- Math Operations
Blocks for common mathematical and matrix operations, including sine and cosine generation; 3-by-3 matrix operations
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)