Custom Variable Mass 3DOF (Wind Axes)
Implement three-degrees-of-freedom equations of motion of custom variable mass with respect to wind axes

Libraries:
Aerospace Blockset /
Equations of Motion /
3DOF
Description
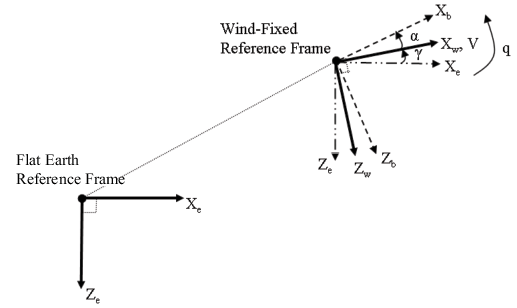
The Custom Variable Mass 3DOF (Wind Axes) block implements three-degrees-of-freedom equations of motion of custom variable mass with respect to wind axes. It considers the rotation in the vertical plane of a wind-fixed coordinate frame about a flat Earth reference frame. For more information about the rotation and equations of motion, see Algorithms.
Ports
Input
Output
Parameters
Algorithms
The block considers the rotation in the vertical plane of a wind-fixed coordinate frame about a flat Earth reference frame.
The equations of motion are
where the applied forces are assumed to act at the center of gravity of the body. Input variables are wind-axes forces Fx and Fz, body moment My, (dm/dt), m, (dIyy/dt), and Iyy. ure, wre, and g are optional input variables.
References
[1] Stevens, Brian, and Frank Lewis. Aircraft Control and Simulation. New York: John Wiley & Sons, 1992.
Extended Capabilities
Version History
Introduced in R2006aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)