maxflow
Maximum flow in graph
Syntax
Description
mf = maxflow(G,s,t)s and t. If graph G
is unweighted (that is, G.Edges does not contain the variable
Weight), then maxflow treats all graph
edges as having a weight equal to 1.
Examples
Maximum Flow in Graph
Create and plot a weighted graph. The weighted edges represent flow capacities.
s = [1 1 2 2 3 4 4 4 5 5]; t = [2 3 3 4 5 3 5 6 4 6]; weights = [0.77 0.44 0.67 0.75 0.89 0.90 2 0.76 1 1]; G = digraph(s,t,weights); plot(G,'EdgeLabel',G.Edges.Weight,'Layout','layered');
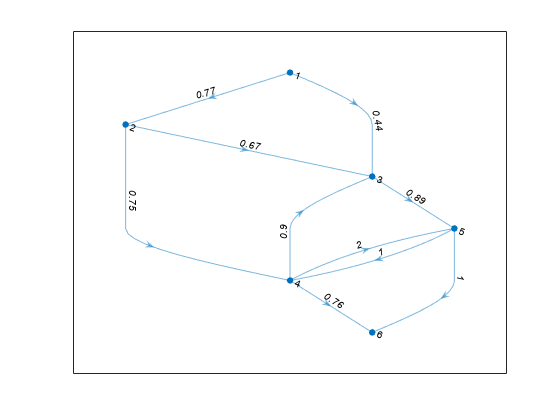
Determine the maximum flow from node 1 to node 6.
mf = maxflow(G,1,6)
mf = 1.2100
Maximum Flow with Specified Algorithm
Create and plot a graph. The weighted edges represent flow capacities.
s = [1 1 2 2 3 3 4];
t = [2 3 3 4 4 5 5];
weights = [10 6 15 5 10 3 8];
G = digraph(s,t,weights);
H = plot(G,'EdgeLabel',G.Edges.Weight);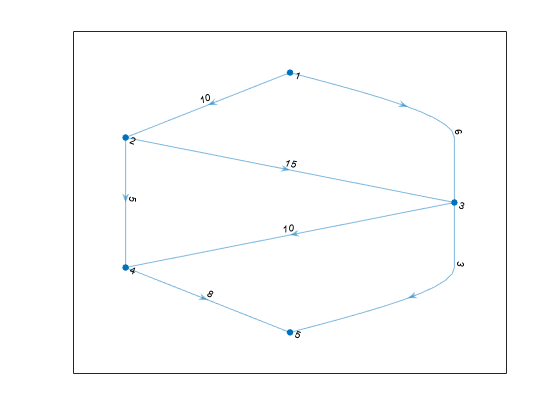
Find the maximum flow value between node 1 and node 5. Specify 'augmentpath' to use the Ford-Fulkerson algorithm, and use two outputs to return a graph of the nonzero flows.
[mf,GF] = maxflow(G,1,5,'augmentpath')mf = 11
GF =
digraph with properties:
Edges: [6x2 table]
Nodes: [5x0 table]
Highlight and label the graph of nonzero flows.
H.EdgeLabel = {};
highlight(H,GF,'EdgeColor','r','LineWidth',2);
st = GF.Edges.EndNodes;
labeledge(H,st(:,1),st(:,2),GF.Edges.Weight);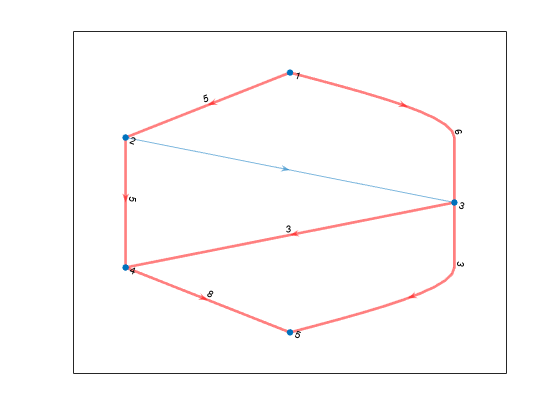
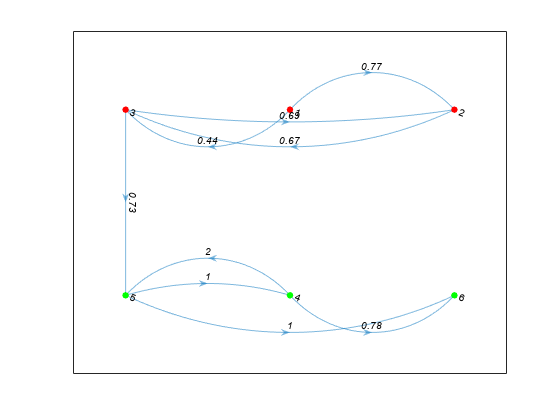
Minimum Cut Computation
Create and plot a weighted graph. The edge weights represent flow capacities.
s = [1 1 2 3 3 4 4 5 5]; t = [2 3 3 2 5 5 6 4 6]; weights = [0.77 0.44 0.67 0.69 0.73 2 0.78 1 1]; G = digraph(s,t,weights); plot(G,'EdgeLabel',G.Edges.Weight,'Layout','layered')
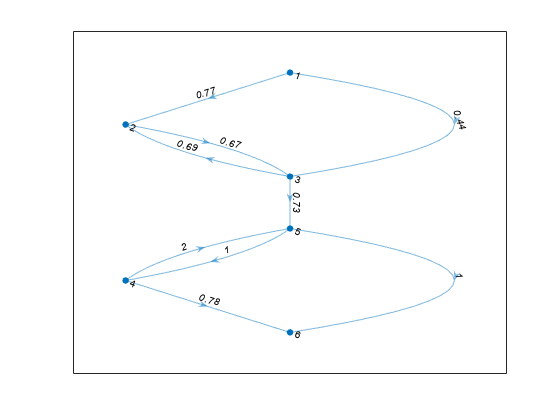
Find the maximum flow and minimum cut of the graph.
[mf,~,cs,ct] = maxflow(G,1,6)
mf = 0.7300
cs = 3×1
1
2
3
ct = 3×1
4
5
6
Plot the minimum cut, using the cs nodes as sources and the ct nodes as sinks. Highlight the cs nodes as red and the ct nodes as green. Note that the weight of the edge that connects these two sets of nodes is equal to the maximum flow.
H = plot(G,'Layout','layered','Sources',cs,'Sinks',ct, ... 'EdgeLabel',G.Edges.Weight); highlight(H,cs,'NodeColor','red') highlight(H,ct,'NodeColor','green')
Input Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2015b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)