minspantree
Minimum spanning tree of graph
Description
T = minspantree(G)T, for graph G.
T = minspantree(G,Name,Value)minspantree(G,'Method','sparse') uses Kruskal’s
algorithm for calculating the minimum spanning tree.
Examples
Minimum Spanning Tree of Cube Graph
Create and plot a cube graph with weighted edges.
s = [1 1 1 2 5 3 6 4 7 8 8 8];
t = [2 3 4 5 3 6 4 7 2 6 7 5];
weights = [100 10 10 10 10 20 10 30 50 10 70 10];
G = graph(s,t,weights);
p = plot(G,'EdgeLabel',G.Edges.Weight);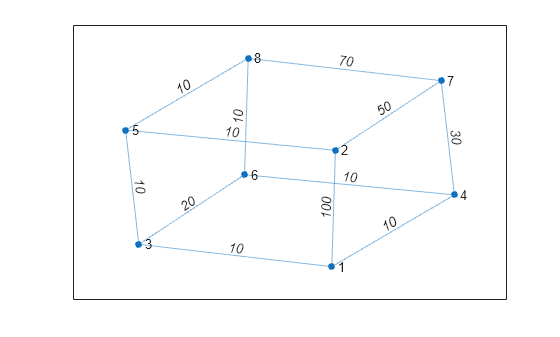
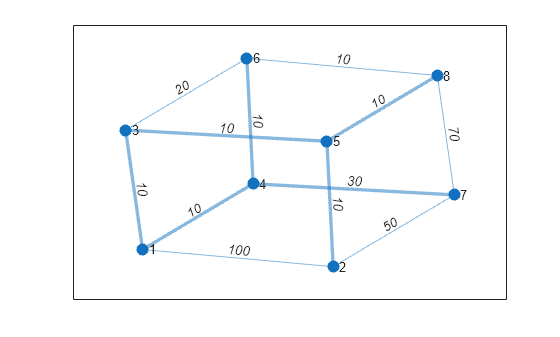
Calculate and plot the minimum spanning tree of the graph on top of the graph. T contains the same nodes as G, but a subset of the edges.
[T,pred] = minspantree(G); highlight(p,T)
Minimum Spanning Forest from Specified Root Node
Create and plot a graph that has multiple components.
s = {'a' 'a' 'a' 'b' 'b' 'c' 'e' 'e' 'f' 'f' 'f' 'f' 'g' 'g'};
t = {'b' 'c' 'd' 'c' 'd' 'd' 'f' 'g' 'g' 'h' 'i' 'j' 'i' 'j'};
G = graph(s,t);
p = plot(G,'Layout','layered');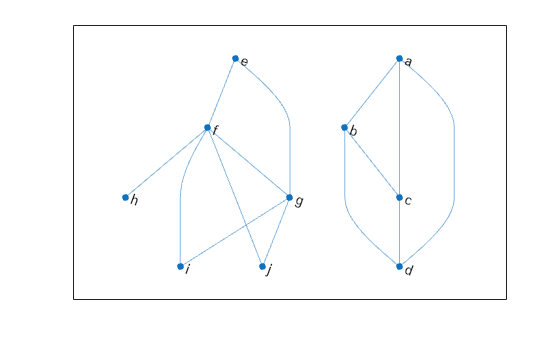
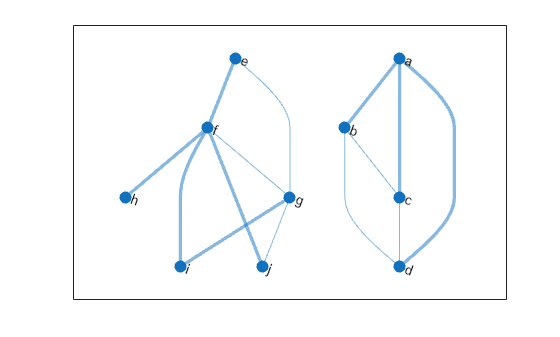
Find the minimum spanning forest for the graph, starting at node i. Highlight the resulting forest in the plot. The graph node names are carried over into the minimum spanning tree graph.
[T,pred] = minspantree(G,'Type','forest','Root',findnode(G,'i')); highlight(p,T)
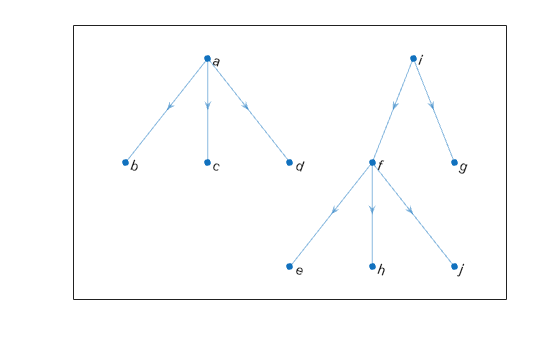
Use the vector of predecessor nodes, pred, to create a directed version of the minimum spanning forest. All of the edges in this tree are directed away from the root nodes in each component (nodes i and a).
rootedTree = digraph(pred(pred~=0),find(pred~=0),[],G.Nodes.Name); plot(rootedTree)
Input Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2015b
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)