Tune PID Controller to Favor Reference Tracking or Disturbance Rejection (PID Tuner)
This example shows how to tune a PID controller to reduce overshoot in reference tracking or to improve rejection of a disturbance at the plant input. Using the PID Tuner app, the example illustrates the tradeoff between reference tracking and disturbance-rejection performance in PI and PID control systems.
In this example, you represent the plant as an LTI model. For information about using PID Tuner to tune a PID Controller block in a Simulink® model, see Tune PID Controller to Favor Reference Tracking or Disturbance Rejection (Simulink Control Design).
Consider the control system of the following illustration.

The plant in this example is:
Reference tracking is the response at y to signals at r. Disturbance rejection is a measure of the suppression at y of signals at d. When you use PID Tuner to tune the controller, you can adjust the design to favor reference tracking or disturbance rejection as your application requires.
Design Initial PI Controller
Having an initial controller design provides a baseline against which you can compare
results as you tune a PI controller. Create an initial PI controller design for the plant
using PID tuning command pidtune.
G = tf(0.3,[1,0.1,0]); % plant model C = pidtune(G,'PI');
Use the initial controller design to open PID Tuner.
pidTuner(G,C)

Add a step response plot of the input disturbance rejection. Select Add Plot > Input Disturbance Rejection.

PID Tuner tiles the disturbance-rejection plot side by side with the reference-tracking plot.

Tip
Use the options in the View tab to change how PID Tuner displays multiple plots.
By default, for a given bandwidth and phase margin, PID Tuner tunes the controller to achieve a balance between reference tracking and disturbance rejection. In this case, the controller yields some overshoot in the reference-tracking response. The controller also suppresses the input disturbance with a longer settling time than the reference tracking, after an initial peak.
Adjust Transient Behavior
Depending on your application, you might want to alter the balance between reference tracking and disturbance rejection to favor one or the other. For a PI controller, you can alter this balance using the Transient Behavior slider. Move the slider to the left to improve the disturbance rejection. The responses with the initial controller design are now displayed as the Baseline response (dotted line).

Lowering the transient-behavior coefficient to 0.45 speeds up disturbance rejection, but also increases overshoot in the reference-tracking response.
Tip
Right-click on the reference-tracking plot and select Characteristics > Peak Response to obtain a numerical value for the overshoot.
Move the Transient behavior slider to the right until the overshoot in the reference-tracking response is minimized.

Increasing the transient-behavior coefficient to 0.70 nearly eliminates the overshoot, but results in extremely sluggish disturbance rejection. You can try moving the Transient behavior slider until you find a balance between reference tracking and disturbance rejection that is suitable for your application. The effect that changing the slider has on the balance depends on the plant model. For some plant models, the effect is not as large as shown in this example.
Change PID Tuning Design Focus
So far, the response time of the control system has remained fixed while you have changed the transient-behavior coefficient. These operations are equivalent to fixing the bandwidth and varying the target minimum phase margin of the system. If you want to fix both the bandwidth and target phase margin, you can still change the balance between reference tracking and disturbance rejection. To tune a controller that favors either disturbance rejection or reference tracking, you change the design focus of the PID tuning algorithm.
Changing the PID Tuner design focus is more effective the more tunable
parameters there are in the control system. Therefore, it does not have much effect when
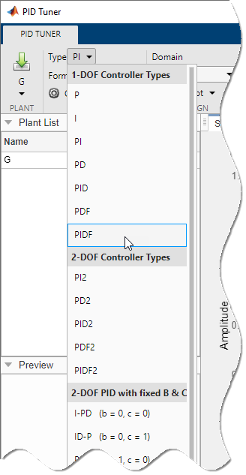
used with a PI controller. To see its effect, change the controller type to PIDF. In the
Type menu, select PIDF.
PID Tuner automatically designs a controller of the new type, PIDF. Move the Transient Behavior slider to set the coefficient back to 0.6.
Save this new design as the baseline design, by clicking the
Export arrow ![]() and selecting
and selecting Save as
Baseline.

The PIDF design replaces the original PI design as the baseline plot.
As in the PI case, the initial PIDF design balances reference tracking and disturbance rejection. Also as in the PI case, the controller yields some overshoot in the reference-tracking response, and suppresses the input disturbance with a similar settling time.

Change the PID Tuner design focus to favor reference tracking without
changing the response time or the transient-behavior coefficient. To do so, click
![]() Options, and in the Focus menu, select
Options, and in the Focus menu, select
Reference tracking.

PID Tuner automatically retunes the controller coefficients with a focus on reference-tracking performance.

The PIDF controller tuned with reference-tracking focus is displayed as Tuned response (solid line). The plots show that the resulting controller tracks the reference input with considerably less overshoot and a faster settling time than the balanced controller design. However, the design yields much poorer disturbance rejection.
Change the design focus to favor disturbance rejection. In the
![]() Options dialog box, in the Focus menu, select
Options dialog box, in the Focus menu, select
Input disturbance rejection.

This controller design yields improved disturbance rejection, but results in some increased overshoot in the reference-tracking response.
When you use design focus option, you can still adjust the Transient Behavior slider for further fine-tuning of the balance between the two measures of performance. Use the design focus and the sliders together to achieve the performance balance that best meets your design requirements. The effect of this fine tuning on system performance depends strongly on the properties of your plant. For some plants, moving the Transient Behavior slider or changing the Focus option has little or no effect.
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)