genfrd
Generalized frequency response data (FRD) model
Description
Use a generalized FRD (genfrd) model to represent a system having
both tunable control design blocks and a fixed numerical component expressed as
frequency-response data. genfrd models keep track of how the tunable
blocks interact with the fixed frequency-response component. For more information about
generalized models with tunable components, see Generalized Models.
Creation
To construct a genfrd model:
Use model interconnection commands such as
feedback,series,parallel, orconnect, or model arithmetic operators such as+or*, to combine a numericfrdmodel with tunable control design blocks or other models containing control design blocks.For an example, see Interconnect Numeric Frequency-Response Data Model with Tunable Block.
Use the
frdcommand to sample agenssmodel at a specified set of frequencies.For an example, see Sample Frequency Response of a Generalized State-Space Model.
Use the
genfrdcommand to sample any numeric LTI model at specified frequencies.For an example, see Convert Numeric LTI Model to Generalized frd Model.
Syntax
Description
fsys = genfrd(
converts a static model or dynamic system model to a generalized FRD model and sets the
value of the sys,frequency)Frequency of fsys. If
sys is not an frd model object, genfrd computes the frequency response
at each point in frequency. If sys is an
frd model, frequency must match the values in
sys.Frequency.
frdsys = genfrd(
further specifies the units of sys,frequency,frequencyunit)Frequency and sets the
FrequencyUnit property of fsys.
frdsys = genfrd(
further specifies the sys,frequency,frequencyunit,timeunit)TimeUnit property of fsys.
This syntax is useful when converting a static model to genfrd form,
because the static model has no associated time unit.
Input Arguments
Properties
Object Functions
The following lists contain a representative subset of the functions you can use with
genfrd models. In general, many functions applicable to generalized
state-space (genss) models are also applicable to genfrd
models. genfrd models do not work with any time-domain analysis functions.
Examples
Interconnect Numeric Frequency-Response Data Model with Tunable Block
Create a genfrd model by connecting a fixed-value frd model with a tunable control design block.
Load frequency-response data. The file wtankData.mat contains a vector of frequencies, frequency, and the corresponding responses of a system, response. In practice, you might obtain such frequency-response data by simulation, frequency-response estimation, or measurement. Use the data to create a numeric frd model.
load wtankData.mat
fsys = frd(response,frequency);
size(fsys)FRD model with 1 outputs, 1 inputs, and 20 frequency points.
Create a tunable PI controller, represented by a tunablePID control design block.
C = tunablePID('C','PI');
Connect the numeric frd model with the tunable PI controller to create a generalized frd model containing one control design block, C.
gsys = feedback(fsys*C,1)
Generalized continuous-time FRD model with 1 outputs, 1 inputs, 20 frequency points, and the following blocks: C: Tunable PID controller, 1 occurrences. Type "frd(gsys)" to see the current value and "gsys.Blocks" to interact with the blocks.
Sample Frequency Response of a Generalized State-Space Model
Create a generalized state-space model of a second-order system in which the natural frequency and damping coefficients are tunable parameters.
wn = realp('wn',3); zeta = realp('zeta',0.8); sys = tf(1,[(1/wn)^2 2*zeta*(1/wn) 1])
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 2 states, and the following blocks: wn: Scalar parameter, 3 occurrences. zeta: Scalar parameter, 1 occurrences. Type "ss(sys)" to see the current value and "sys.Blocks" to interact with the blocks.
Sample sys at frequencies of interest using the genfrd command. The result is a genfrd model with the same tunable parameters as sys.
frequency = logspace(-1,2,20); fsys = genfrd(sys,frequency)
Generalized continuous-time FRD model with 1 outputs, 1 inputs, 20 frequency points, and the following blocks: wn: Scalar parameter, 3 occurrences. zeta: Scalar parameter, 1 occurrences. Type "frd(fsys)" to see the current value and "fsys.Blocks" to interact with the blocks.
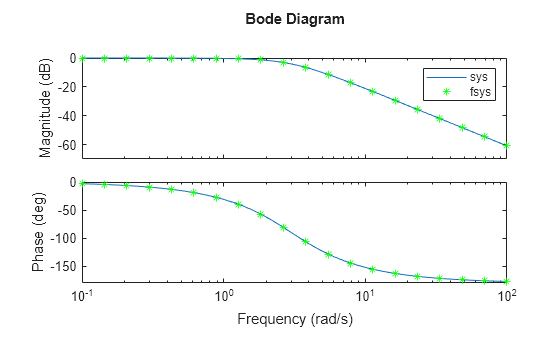
To confirm the correspondence of the genfrd model fsys and the genss model sys, plot the responses of both models with their tunable parameters set to their current values.
bode(sys,"-",fsys,"g*") legend
Convert Numeric LTI Model to Generalized frd Model
Create a numeric transfer function model and convert it to genfrd form. To do so, use the genfrd command, providing a vector of frequencies at which to sample the response.
sys = tf(1,[1 1]); frequency = logspace(-1,2,20); fsys = genfrd(sys,frequency)
Generalized continuous-time FRD model with 1 outputs, 1 inputs, 20 frequency points, and no blocks. Type "frd(fsys)" to see the current value and "fsys.Blocks" to interact with the blocks.
The resulting model is a genfrd model. However, fsys contains no control design blocks.
fblocks = fsys.Blocks
fblocks = struct with no fields.
Version History
Introduced in R2011a
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)