getCompSensitivity
Complementary sensitivity function from generalized model of control system
Description
T = getCompSensitivity(CL,location)
T = getCompSensitivity(CL,location,opening)
If opening and location list the same
point, the software opens the loop after adding the disturbance signal at the
point.
Examples
Complementary Sensitivity Function at a Location
Compute the complementary sensitivity at the plant output, X, of the control system of the following illustration.
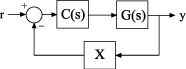
Create a model of the system by specifying and connecting a numeric LTI plant model G, a tunable controller C, and the AnalysisPoint block X. Use the AnalysisPoint block to mark the location where you assess the complementary sensitivity, which in this example is the plant output.
G = tf([1],[1 5]); C = tunablePID('C','p'); C.Kp.Value = 3; X = AnalysisPoint('X'); CL = feedback(G*C,X);
CL is a genss model that represents the closed-loop response of the control system from r to y. Examine the Control Design Blocks of the model.
CL.Blocks
ans = struct with fields:
C: [1x1 tunablePID]
X: [1x1 AnalysisPoint]
The model's blocks include the AnalysisPoint block, X, that identifies the analysis-point location.
Calculate the complementary sensitivity, T, at X.
T = getCompSensitivity(CL,'X')Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: C: Tunable PID controller, 1 occurrences. X: Analysis point, 1 channels, 1 occurrences. Type "ss(T)" to see the current value and "T.Blocks" to interact with the blocks.
getCompSensitivity preserves the Control Design Blocks of CL, and returns a genss model. To get a numeric model, you can convert T to transfer-function form, using the current value of the tunable block.
Tnum = tf(T)
Tnum = From input "X" to output "X": -3 ----- s + 8 Continuous-time transfer function.
Specify Additional Loop Opening for Complementary Sensitivity Function Calculation
In the multiloop system of the following illustration, calculate the inner-loop sensitivity at the output of G2, with the outer loop open.
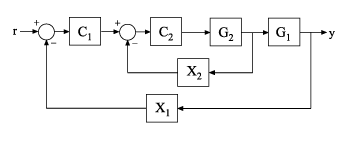
Create a model of the system by specifying and connecting the numeric plant models, tunable controllers, and AnalysisPoint blocks. G1 and G2 are plant models, C1 and C2 are tunable controllers, and X1 and X2 are AnalysisPoint blocks that mark potential loop-opening locations.
G1 = tf(10,[1 10]); G2 = tf([1 2],[1 0.2 10]); C1 = tunablePID('C','pi'); C2 = tunableGain('G',1); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2'); CL = feedback(G1*feedback(G2*C2,X2)*C1,X1);
Calculate the complementary sensitivity, , at X2, with the outer loop open at X1. Specifying X1 as the third input argument tells getCompSensitivity to open the loop at that location.
T = getCompSensitivity(CL,'X2','X1'); tf(T)
ans =
From input "X2" to output "X2":
-s - 2
----------------
s^2 + 1.2 s + 12
Continuous-time transfer function.
Input Arguments
Output Arguments
More About
Complementary Sensitivity
The complementary sensitivity function, T, at a point is the closed-loop transfer function around the feedback loop measured at the specified location. It is related to the open-loop transfer function, L, and the sensitivity function, S, at the same point as follows:
Use getLoopTransfer and getSensitivity to compute
L and S.
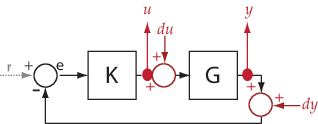
Consider the following model:
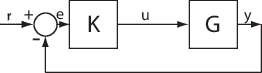
The complementary sensitivity, T, at y is
defined as the transfer function from dy to
y.
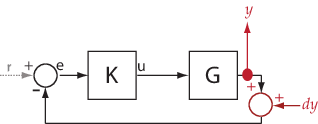
Observe that, in contrast to the sensitivity function, the disturbance,
dy, is added after the measurement,
y.
Here, I is an identity matrix of the same size as GK. The complementary sensitivity transfer function at
y is equal to -1 times the closed-loop
transfer function from r to y.
Complementary sensitivity at multiple locations, for example, u
and y, is defined as the MIMO transfer function from the
disturbances to measurements:
Version History
Introduced in R2014a
See Also
getPoints | AnalysisPoint | genss | getLoopTransfer | systune | getIOTransfer (Simulink Control Design) | getSensitivity | getValue | getCompSensitivity (Simulink Control Design)
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)