dsp.Interpolator
(Removed) Linear or polyphase FIR interpolation
dsp.Interpolator has been removed. Use dsp.FIRInterpolator, interp1 instead. For more information, see
Compatibility Considerations.
Description
The dsp.Interpolator
System object™ interpolates values between real-valued input samples using linear or polyphase
FIR interpolation. Specify which values to interpolate by providing a vector of interpolation
points. An interpolation point of 1 refers to the first sample in the input. To interpolate
the value halfway between the second and third sample in the input, specify an interpolation
point of 2.5. Interpolation points that are not within the valid range are replaced with the
closest value in the valid range.
To interpolate a real-valued input signal:
Create the
dsp.Interpolatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
interp = dsp.Interpolatorinterp, to interpolate values between real-valued
input samples using linear interpolation.
interp = dsp.Interpolator(Name,Value)interp, with each specified property set to the
specified value. Enclose each property name in single quotes.
Example: interp = dsp.Interpolator('InterpolationPointsSource','Input port')
Properties
Usage
Description
interpOut = interp(input)interpOut, of the input vector or
matrix input, as specified in the InterpolationPoints property. Each column of
input is treated as an independent channel of the input.
interpOut = interp(input,ipts)ipts.
To specify the interpolation points, set the InterpolationPointsSource property to 'Input
port'.
t = 0:.0001:.0511; x = sin(2*pi*20*t); x1 = x(1:50:end); ipts = 1:0.1:length(x1); interp = dsp.Interpolator('InterpolationPointsSource','Input port'); interpOut = interp(x1',ipts');
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Algorithms
Linear Interpolation Mode
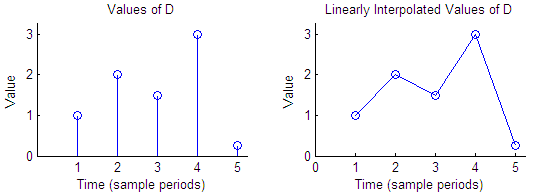
In the linear interpolation mode, the algorithm interpolates data values by assuming that the data varies linearly between samples taken at adjacent sample times.
Suppose the input signal is D = [1 2 1.5 3 0.25]' . The left plot
shows the samples in D and the right plot shows the linearly interpolated
values between the samples in D.
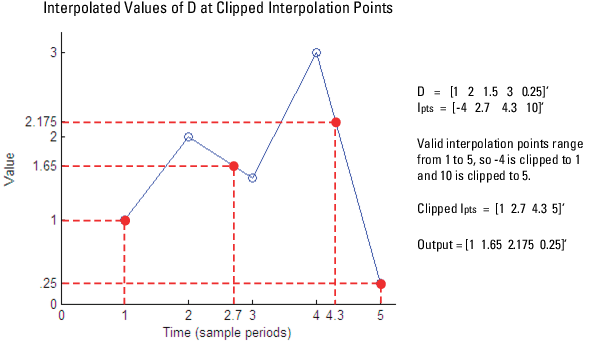
When the interpolation points are out of range, the algorithm clips the invalid
interpolation points. Consider an input signal, D = [1 2 1.5 3 0.25]' ,
and an interpolation vector, IPts = [-4 2.7 4.3
10]'. The interpolated output is given by [1 1.65 2.175
0.25]'.
Extended Capabilities
Version History
Introduced in R2012aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)