Interpolation
Interpolate values of real input samples
Libraries:
DSP System Toolbox /
Signal Operations
Description
The Interpolation block interpolates discrete, real inputs by using linear or FIR interpolation. The block accepts a vector, a matrix, or an N-D array. The block outputs a scalar, a vector, a matrix, or an N-D array of the interpolated values.
You must specify the interpolation points, the times at which to interpolate values in a one-based interpolation array IPts. An entry of 1 in IPts refers to the first sample of the input data, an entry of 2.5 refers to the sample halfway between the second and third input sample, and so on. Depending on the dimensions of the input data, IPts can be a scalar, a length-P row, or a column vector, a P-by-N matrix, or an N-D array where P is the size of the first dimension of the N-D array. In most cases, P can be any positive integer. For more information about valid interpolation arrays, refer to the tables in Pts and Interpolation points.
In most cases, the block applies IPts across
the first dimension of an N-D input array or to each input vector.
You can set the block to apply the same interpolation array for all input data, static
interpolation points entered on the block mask, or to use a different interpolation
array for each N-D array, matrix, or vector input, time-varying
interpolation points received through the Pts input
port.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
More About
Algorithms
Linear Interpolation Mode
When Interpolation
mode is set to Linear, the block interpolates data
values by assuming that the data varies linearly between samples taken at adjacent
sample times.
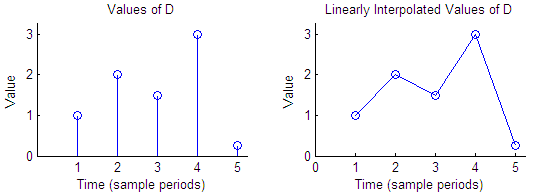
For instance, if the input signal D = [1 2 1.5 3 0.25]', the plot on the left shows the samples in D and the plot on the right shows the linearly interpolated values between the samples in D.
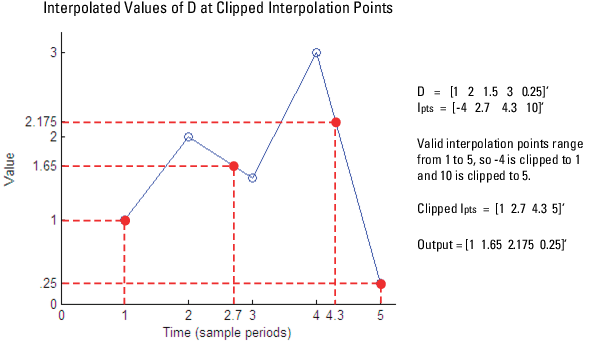
The following figure illustrates the case of a block in linear interpolation mode that is set to clip out-of-range interpolation points. The vector D supplies the input data and the vector IPts supplies the interpolation points:
D = [1 2 1.5 3 0.25]'IPts = [-4 2.7 4.3 10]'
The block clips the invalid interpolation points and outputs the linearly
interpolated values in a vector, [1 1.65 2.175 0.25]'.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)