Sine Wave
Generate continuous or discrete sine wave
Libraries:
DSP System Toolbox /
Sources
DSP System Toolbox HDL Support /
Sources
Description
The Sine Wave block generates a multichannel real or complex sinusoidal signal, with independent amplitude, frequency, and phase in each output channel. The block supports floating point and signed fixed-point data types.
The block generates a real sinusoidal signal when you set the Output
complexity parameter to Real. The real
sinusoidal output is defined by an expression of the type
where you specify A in the Amplitude parameter, f in hertz in the Frequency parameter, and ϕ in radians in the Phase offset parameter.
The block generates a complex exponential signal when you set the Output
complexity parameter to Complex. This complex
exponential signal is defined by an expression of the type
Generating Multichannel Outputs
For both real and complex sinusoids, the Amplitude, Frequency, and Phase offset parameter values (A, f, and ϕ) can be scalars or length-N vectors, where N is the desired number of channels in the output. When you specify at least one of these parameters as a length-N vector, scalar values specified for the other parameters are applied to every channel.
For example, to generate the three-channel output containing the following real sinusoids, set the block parameters as shown:
Output complexity =
RealAmplitude =
[1 2 3]Frequency =
[1000 500 250]Phase offset =
[0 0 pi/2]
Examples
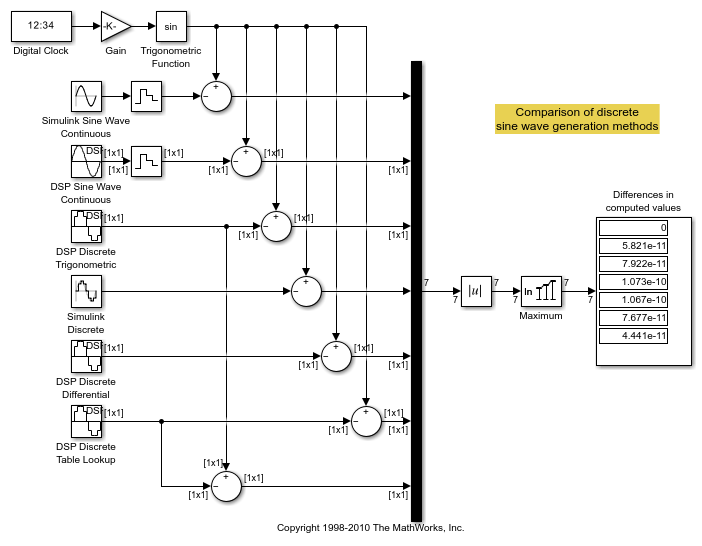
Generate Sample-Based Sine Waves
This example compares the different methods of generating sample-based sine waves from the Sine Wave block in DSP System Toolbox.
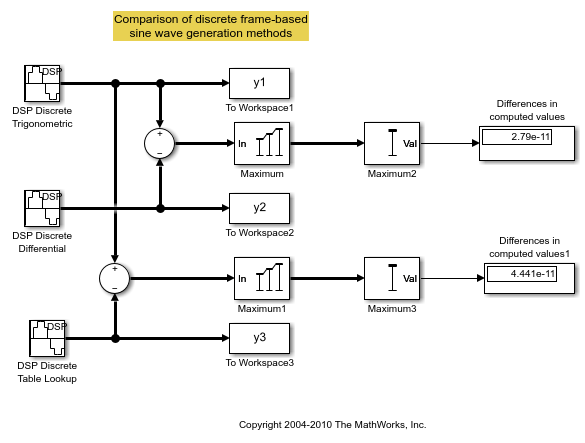
Generate Frame-Based Sine Waves
This example compares the different methods of generating frame-based sine waves from the Sine Wave block in DSP System Toolbox™.
Ports
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Algorithms
Extended Capabilities
Version History
Introduced before R2006a
See Also
Blocks
- Chirp | Signal From Workspace | Signal Generator (Simulink) | Sine Wave (Simulink) | Enabled Subsystem (Simulink)
Functions
Objects
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)