filter
Filter disturbances through conditional variance model
Description
Tbl2 = filter(Mdl,Tbl1)Tbl2 containing the results
from filtering the paths of disturbances in the input table or timetable
Tbl1 through Mdl. The disturbance
variable in Tbl1 is associated with the model innovations
process through Mdl. (since R2023a)
filter selects the response variable named in
Mdl.SeriesName or the sole variable in
Tbl1. To select a different disturbance variable in
Tbl1 to filter through the model, use the
DisturbanceVariable name-value argument.
[___] = filter(___,
specifies options using one or more name-value arguments in
addition to any of the input argument combinations in previous syntaxes.
Name,Value)filter returns the output argument combination for the
corresponding input arguments. For example, filter(Mdl,Z,Z0=PS) filters the
numeric vector of disturbances Z through the conditional
variance model Mdl and specifies the numeric vector of
presample disturbance data PS to initialize the model.
Examples
Filter Numeric Vector Containing Disturbance Path
Demonstrate that simulate and filter can return equal quantities. Supply data in a numeric vector.
Specify a GARCH(1,1) model with Gaussian innovations.
Mdl = garch(Constant=0.005,GARCH=0.8,ARCH=0.1);
Simulate the model using Monte Carlo simulation. Then, standardize the simulated innovations and filter them.
rng(1) % For reproducibility
[vs,es] = simulate(Mdl,100,E0=0,V0=0.05);
Z = es./sqrt(vs);
[vf,ef] = filter(Mdl,Z,Z0=0,V0=0.05);Confirm that the outputs of simulate and filter are identical.
norm(vs-vf)
ans = 0
A norm of 0 indicates that the two outputs are identical.
Filter Timetable of Disturbance Data Through GARCH Model
Since R2023a
Fit a GARCH(1,1) model to the average weekly closing NASDAQ returns, and then filter a randomly generated series of disturbances through the estimated model. Supply timetables of data throughout the process.
Load the U.S. equity indices data Data_EquityIdx.mat.
load Data_EquityIdxThe timetable DataTimeTable contains the daily NASDAQ closing prices, among other indices.
Compute the weekly average closing prices of all timetable variables.
DTTW = convert2weekly(DataTimeTable,Aggregation="mean");Compute the weekly returns.
DTTRet = price2ret(DTTW); DTTRet.Interval = []; T = height(DTTRet)
T = 626
Plot the weekly NASDAQ returns.
figure
plot(DTTRet.Time,DTTRet.NASDAQ)
title("NASDAQ Weekly Returns")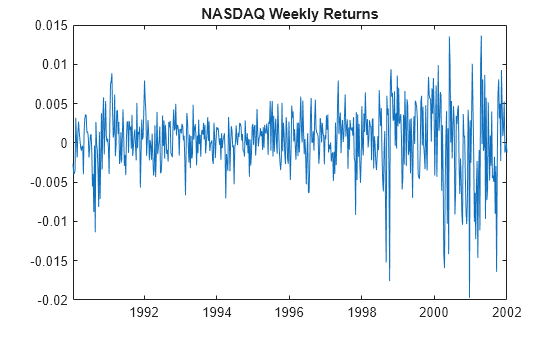
The returns exhibit volatility clustering.
When you plan to supply a timetable, you must ensure it has all the following characteristics:
The selected response variable is numeric and does not contain any missing values.
The timestamps in the
Timevariable are regular, and they are ascending or descending.
Remove all missing values from the timetable, relative to the NASDAQ returns series.
DTTRet = rmmissing(DTTRet,DataVariables="NASDAQ");
numobs = height(DTTRet)numobs = 626
Because all sample times have observed NASDAQ returns, rmmissing does not remove any observations.
Determine whether the sampling timestamps have a regular frequency and are sorted.
areTimestampsRegular = isregular(DTTRet,"weeks")areTimestampsRegular = logical
1
areTimestampsSorted = issorted(DTTRet.Time)
areTimestampsSorted = logical
1
areTimestampsRegular = 1 indicates that the timestamps of DTTRet represent a regular weekly sample. areTimestampsSorted = 1 indicates that the timestamps are sorted.
Specify a GARCH(1,1) model, and fit it to the series. Name the response series of the model NASDAQ by using dot notation.
Mdl = garch(1,1);
Mdl.SeriesName = "NASDAQ";
EstMdl = estimate(Mdl,DTTRet);
GARCH(1,1) Conditional Variance Model (Gaussian Distribution):
Value StandardError TStatistic PValue
__________ _____________ __________ __________
Constant 1.7406e-06 8.9077e-07 1.9541 0.050694
GARCH{1} 0.65947 0.059314 11.118 1.0229e-28
ARCH{1} 0.33773 0.079595 4.2431 2.2044e-05
estimate fits the model to the response data in the NASDAQ variable of DTTRet because the name matches the name of the response variable in Mdl.SeriesName. Alternatively, you can specify the response variable by using the ResponseVariable name-value argument.
Generate 2 random, independent series of length T from the standard Gaussian distribution. Store the matrix of series as one variable in DTTRet.
rng(1) % For reproducibility
DTTRet.Z = randn(T,2);DTTRet contains a new variable called Z containing a T-by-2 matrix of five disturbance paths.
Filter the paths of disturbances through the estimated GARCH model. Specify the table variable name containing the disturbance paths.
Tbl2 = filter(EstMdl,DTTRet,DisturbanceVariable="Z")Tbl2=626×5 timetable
Time NYSE NASDAQ Z NASDAQ_Variance NASDAQ_Response
___________ ___________ ___________ _____________________ ________________________ ________________________
12-Jan-1990 -0.0031597 -0.0026701 -0.64901 -0.50964 0.00059063 0.00045179 -0.015773 -0.010833
19-Jan-1990 -0.0038123 -0.0039103 1.1812 0.088893 0.00047526 0.00033931 0.02575 0.0016375
26-Jan-1990 -0.0040706 -0.0039139 -0.75845 -0.019698 0.0005391 0.00022641 -0.01761 -0.0002964
02-Feb-1990 -0.00099691 -0.0033847 -1.1096 -0.73807 0.00046199 0.00015108 -0.02385 -0.0090721
09-Feb-1990 0.0022796 0.0031891 -0.84555 -1.1522 0.00049852 0.00012917 -0.018879 -0.013095
16-Feb-1990 -0.00021948 0.00037747 -0.57266 -1.9476 0.00045087 0.00014484 -0.01216 -0.023439
23-Feb-1990 -0.0022725 -0.0018693 -0.55868 0.026296 0.00034901 0.0002828 -0.010437 0.00044221
02-Mar-1990 0.0019481 0.0012208 0.17838 -0.82589 0.00026869 0.0001883 0.002924 -0.011333
09-Mar-1990 0.0022677 0.0026984 -0.19686 -0.71799 0.00018182 0.0001693 -0.0026545 -0.0093421
16-Mar-1990 0.00029781 0.0012667 0.58644 -1.941 0.00012403 0.00014286 0.0065311 -0.0232
23-Mar-1990 0.00027271 0.00042646 -0.85189 0.98755 9.7938e-05 0.00027773 -0.0084306 0.016458
30-Mar-1990 0.00022176 -0.00052576 0.80032 -1.6631 9.0332e-05 0.00027637 0.0076065 -0.027648
06-Apr-1990 0.00016495 -0.0010113 -1.5094 2.0633 8.0852e-05 0.00044217 -0.013572 0.043387
13-Apr-1990 0.00050551 -0.00037366 0.87587 -2.082 0.00011727 0.00092909 0.009485 -0.063462
20-Apr-1990 -0.00072855 -0.00042758 -0.24279 0.27316 0.00010946 0.0019746 -0.0025402 0.012138
27-Apr-1990 -0.0039166 -0.0039974 0.16681 -2.3767 7.6106e-05 0.0013537 0.0014553 -0.087447
⋮
Tbl2 is a 626-by-5 timetable containing all variables in DTTRet, the two filtered conditional variance paths NASDAQ_Variance, and the two filtered response paths NASDAQ_Response.
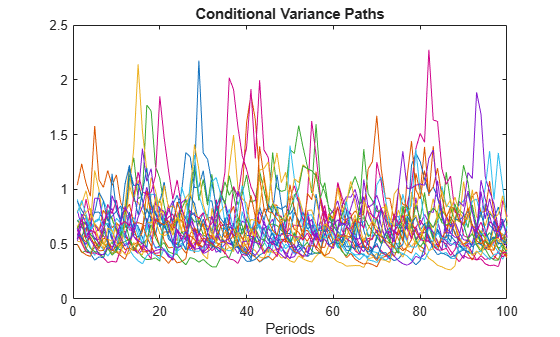
Filter Multiple Disturbance Paths Through EGARCH Model
Specify an EGARCH(1,1) model with Gaussian innovations.
Mdl = egarch(Constant=-0.1,GARCH=0.8,ARCH=0.3, ...
Leverage=-0.05);Simulate 25 series of standard Gaussian observations for 100 periods.
rng(1); % For reproducibility
Z = randn(100,25);Z represents 25 paths of synchronized disturbances for 100 periods.
Obtain 25 paths of conditional variances by filtering the disturbance paths through the EGARCH(1,1) model.
V = filter(Mdl,Z);
Plot the paths of conditional variances.
figure; plot(V); title("Conditional Variance Paths"); xlabel("Periods");
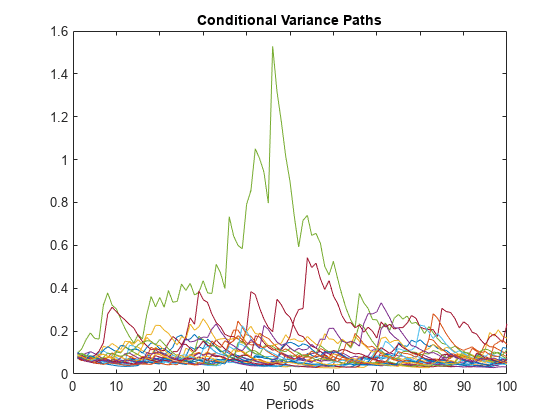
Filter Disturbances Through GJR Model Specifying Presample Observations
Specify a GJR(1,2) model with Gaussian innovations.
Mdl = gjr(Constant=0.005,GARCH=0.8,ARCH={0.1 0.01}, ...
Leverage={0.05 0.01});Simulate 25 series of standard Gaussian observations for 102 periods.
rng(1); % For reproducibility
Z = randn(102,25);Z represents 25 paths of synchronized disturbances for 102 periods.
Obtain 25, 100 period paths of conditional variances by filtering the disturbance paths through the GJR(1,2) model. Specify the first two disturbances as presample observations.
V = filter(Mdl,Z(3:end,:),Z0=Z(1:2,:));
Plot the paths of conditional variances.
figure plot(V) title("Conditional Variance Paths"); xlabel("Periods");
Input Arguments
Output Arguments
Alternatives
filter generalizes simulate. Both function filter a series of disturbances to produce
output responses and conditional variances. However, simulate
autogenerates a series of mean-zero, unit-variance, independent and identically
distributed (iid) disturbances according to the distribution in the conditional variance
model object, Mdl. In contrast, filter
lets you directly specify your own disturbances.
References
[1] Bollerslev, T. “Generalized Autoregressive Conditional Heteroskedasticity.” Journal of Econometrics. Vol. 31, 1986, pp. 307–327.
[2] Bollerslev, T. “A Conditionally Heteroskedastic Time Series Model for Speculative Prices and Rates of Return.” The Review of Economics and Statistics. Vol. 69, 1987, pp. 542–547.
[3] Box, G. E. P., G. M. Jenkins, and G. C. Reinsel. Time Series Analysis: Forecasting and Control. 3rd ed. Englewood Cliffs, NJ: Prentice Hall, 1994.
[4] Enders, W. Applied Econometric Time Series. Hoboken, NJ: John Wiley & Sons, 1995.
[5] Engle, R. F. “Autoregressive Conditional Heteroskedasticity with Estimates of the Variance of United Kingdom Inflation.” Econometrica. Vol. 50, 1982, pp. 987–1007.
[6] Hamilton, J. D. Time Series Analysis. Princeton, NJ: Princeton University Press, 1994.
Version History
Introduced in R2012aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)