cordiccart2pol
Transform Cartesian coordinates to polar using CORDIC-based approximation
Syntax
Description
Examples
Input Arguments
Output Arguments
More About
Algorithms
Signal Flow Diagrams
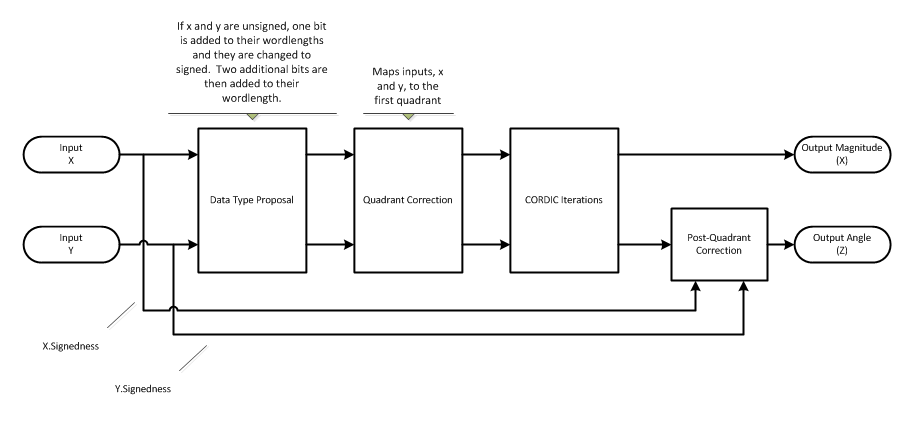
CORDIC Vectoring Kernel
The accuracy of the CORDIC kernel depends on the choice of initial values for X, Y, and Z. This algorithm uses the following initial values:
Extended Capabilities
Version History
Introduced in R2011b
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)