Solve a Mixed-Integer Engineering Design Problem Using the Genetic Algorithm
This example shows how to solve a mixed integer engineering design problem using the Genetic Algorithm (ga) solver in Global Optimization Toolbox.
The problem illustrated in this example involves the design of a stepped cantilever beam. In particular, the beam must be able to carry a prescribed end load. We will solve a problem to minimize the beam volume subject to various engineering design constraints.
In this example we will solve two bounded versions of the problem published in [1].
Stepped Cantilever Beam Design Problem
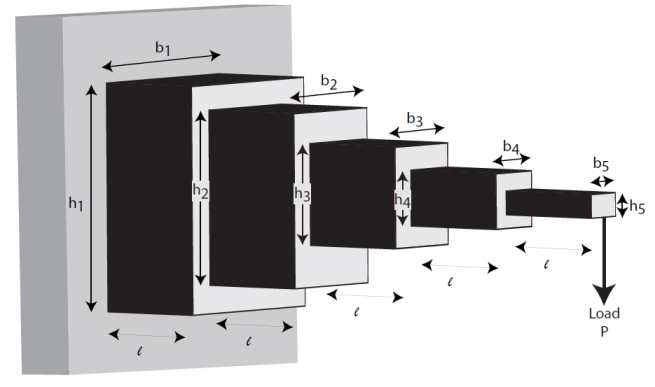
A stepped cantilever beam is supported at one end and a load is applied at the free end, as shown in the figure below. The beam must be able to support the given load,  , at a fixed distance
, at a fixed distance  from the support. Designers of the beam can vary the width (
from the support. Designers of the beam can vary the width ( ) and height (
) and height ( ) of each section. We will assume that each section of the cantilever has the same length,
) of each section. We will assume that each section of the cantilever has the same length,  .
.
Volume of the beam
The volume of the beam,  , is the sum of the volume of the individual sections
, is the sum of the volume of the individual sections

Constraints on the Design : 1 - Bending Stress
Consider a single cantilever beam, with the center of coordinates at the center of its cross section at the free end of the beam. The bending stress at a point  in the beam is given by the following equation
in the beam is given by the following equation

where  is the bending moment at
is the bending moment at  , is the distance from the end load and
, is the distance from the end load and  is the area moment of inertia of the beam.
is the area moment of inertia of the beam.
Now, in the stepped cantilever beam shown in the figure, the maximum moment of each section of the beam is  , where
, where  is the maximum distance from the end load, , for each section of the beam. Therefore, the maximum stress for the
is the maximum distance from the end load, , for each section of the beam. Therefore, the maximum stress for the  -th section of the beam,
-th section of the beam,  , is given by
, is given by

where the maximum stress occurs at the edge of the beam,  . The area moment of inertia of the -th section of the beam is given by
. The area moment of inertia of the -th section of the beam is given by

Substituting this into the equation for gives

The bending stress in each part of the cantilever should not exceed the maximum allowable stress,  . Consequently, we can finally state the five bending stress constraints (one for each step of the cantilever)
. Consequently, we can finally state the five bending stress constraints (one for each step of the cantilever)





Constraints on the Design : 2 - End deflection
The end deflection of the cantilever can be calculated using Castigliano's second theorem, which states that

where  is the deflection of the beam,
is the deflection of the beam,  is the energy stored in the beam due to the applied force, .
is the energy stored in the beam due to the applied force, .
The energy stored in a cantilever beam is given by
where  is the moment of the applied force at .
is the moment of the applied force at .
Given that  for a cantilever beam, we can write the above equation as
for a cantilever beam, we can write the above equation as
![$$U = P^2/2E \int_0^l \! [(x+4l)^2/I_1 \, + (x+3l)^2/I_2 \, + (x+2l)^2/I_3 \, + (x+l)^2/I_4 \, + x^2/I_5 ]\, \mathrm{d} x$$](../examples/globaloptim/win64/steppedCantileverExample_eq17007742970191506642.png)
where  is the area moment of inertia of the
is the area moment of inertia of the  -th part of the cantilever. Evaluating the integral gives the following expression for .
-th part of the cantilever. Evaluating the integral gives the following expression for .

Applying Castigliano's theorem, the end deflection of the beam is given by

Now, the end deflection of the cantilever, , should be less than the maximum allowable deflection,  , which gives us the following constraint.
, which gives us the following constraint.

Constraints on the Design : 3 - Aspect ratio
For each step of the cantilever, the aspect ratio must not exceed a maximum allowable aspect ratio,  . That is,
. That is,
 for
for 
State the Optimization Problem
We are now able to state the problem to find the optimal parameters for the stepped cantilever beam given the stated constraints.
Let  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  and
and 
Minimize:

Subject to:






 ,
,  ,
,  ,
,  and
and 
The first step of the beam can only be machined to the nearest centimeter. That is,  and
and  must be integer. The remaining variables are continuous. The bounds on the variables are given below:-
must be integer. The remaining variables are continuous. The bounds on the variables are given below:-






Design Parameters for This Problem
For the problem we will solve in this example, the end load that the beam must support is  .
.
The beam lengths and maximum end deflection are:
Total beam length,

Individual section of beam,

Maximum beam end deflection,

The maximum allowed stress in each step of the beam, 
Young's modulus of each step of the beam, 
Solve the Mixed Integer Optimization Problem
We now solve the problem described in State the Optimization Problem.
Define the Fitness and Constraint Functions
Examine the MATLAB® files cantileverVolume.m and cantileverConstraints.m to see how the fitness and constraint functions are implemented.
A note on the linear constraints: When linear constraints are specified to ga, you normally specify them via the A, b, Aeq and beq inputs. In this case we have specified them via the nonlinear constraint function. This is because later in this example, some of the variables will become discrete. When there are discrete variables in the problem it is far easier to specify linear constraints in the nonlinear constraint function. The alternative is to modify the linear constraint matrices to work in the transformed variable space, which is not trivial and maybe not possible. Also, in the mixed integer ga solver, the linear constraints are not treated any differently to the nonlinear constraints regardless of how they are specified.
Set the Bounds
Create vectors containing the lower bound (lb) and upper bound constraints (ub).
lb = [1 30 2.4 45 2.4 45 1 30 1 30]; ub = [5 65 3.1 60 3.1 60 5 65 5 65];
Set the Options
To obtain a more accurate solution, we increase the PopulationSize, and MaxGenerations options from their default values, and decrease the EliteCount and FunctionTolerance options. These settings cause ga to use a larger population (increased PopulationSize), to increase the search of the design space (reduced EliteCount), and to keep going until its best member changes by very little (small FunctionTolerance). We also specify a plot function to monitor the penalty function value as ga progresses.
Note that there are a restricted set of ga options available when solving mixed integer problems - see Global Optimization Toolbox User's Guide for more details.
opts = optimoptions(@ga, ... 'PopulationSize', 150, ... 'MaxGenerations', 200, ... 'EliteCount', 10, ... 'FunctionTolerance', 1e-8, ... 'PlotFcn', @gaplotbestf);
Call ga to Solve the Problem
We can now call ga to solve the problem. In the problem statement and are integer variables. We specify this by passing the index vector [1 2] to ga after the nonlinear constraint input and before the options input. We also seed and set the random number generator here for reproducibility.
rng(0, 'twister'); [xbest, fbest, exitflag] = ga(@cantileverVolume, 10, [], [], [], [], ... lb, ub, @cantileverConstraints, [1 2], opts);
ga stopped because it exceeded options.MaxGenerations.
Analyze the Results
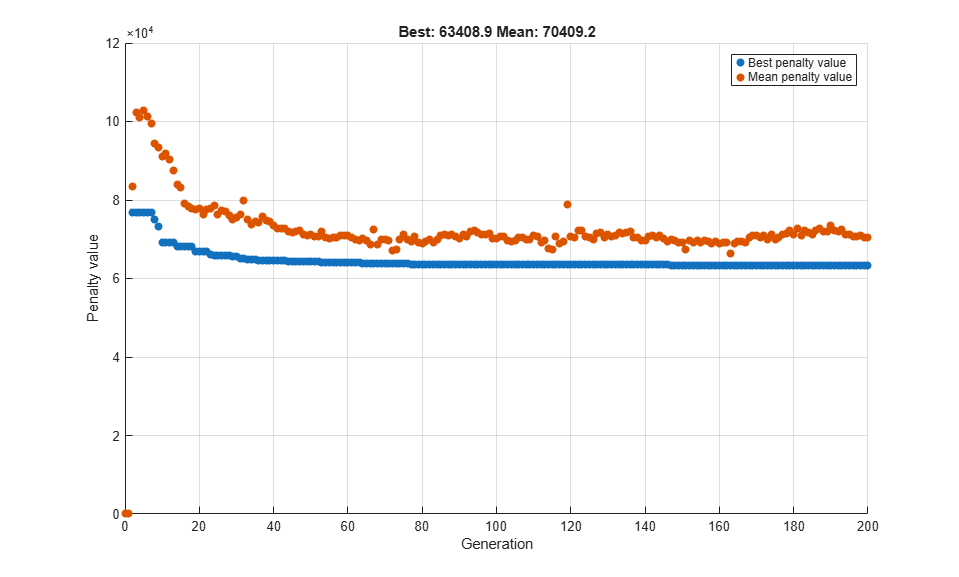
If a problem has integer constraints, ga reformulates it internally. In particular, the fitness function in the problem is replaced by a penalty function which handles the constraints. For feasible population members, the penalty function is the same as the fitness function.
The solution returned from ga is displayed below. Note that the section nearest the support is constrained to have a width () and height () which is an integer value and this constraint has been honored by GA.
display(xbest);
xbest =
Columns 1 through 7
3.0000 60.0000 2.8504 57.0057 2.6114 50.6243 2.2132
Columns 8 through 10
44.2349 1.7543 35.0595
We can also ask ga to return the optimal volume of the beam.
fprintf('\nCost function returned by ga = %g\n', fbest);
Cost function returned by ga = 63408.9
Add Discrete Non-Integer Variable Constraints
The engineers are now informed that the second and third steps of the cantilever can only have widths and heights that are chosen from a standard set. In this section, we show how to add this constraint to the optimization problem. Note that with the addition of this constraint, this problem is identical to that solved in [1].
First, we state the extra constraints that will be added to the above optimization
The width of the second and third steps of the beam must be chosen from the following set:- [2.4, 2.6, 2.8, 3.1] cm
The height of the second and third steps of the beam must be chosen from the following set:- [45, 50, 55, 60] cm
To solve this problem, we need to be able to specify the variables  ,
,  ,
,  and
and  as discrete variables. To specify a component
as discrete variables. To specify a component  as taking discrete values from the set
as taking discrete values from the set  , optimize with an integer variable taking values from 1 to
, optimize with an integer variable taking values from 1 to  , and use
, and use  as the discrete value. To specify the range (1 to ), set 1 as the lower bound and as the upper bound.
as the discrete value. To specify the range (1 to ), set 1 as the lower bound and as the upper bound.
So, first we transform the bounds on the discrete variables. Each set has 4 members and we will map the discrete variables to an integer in the range [1, 4]. So, to map these variables to be integer, we set the lower bound to 1 and the upper bound to 4 for each of the variables.
lb = [1 30 1 1 1 1 1 30 1 30]; ub = [5 65 4 4 4 4 5 65 5 65];
Transformed (integer) versions of , , and will now be passed to the fitness and constraint functions when the ga solver is called. To evaluate these functions correctly, , , and need to be transformed to a member of the given discrete set in these functions. To see how this is done, examine the MATLAB files cantileverVolumeWithDisc.m, cantileverConstraintsWithDisc.m and cantileverMapVariables.m.
Now we can call ga to solve the problem with discrete variables. In this case  are integers. This means that we pass the index vector
are integers. This means that we pass the index vector 1:6 to ga to define the integer variables.
rng(0, 'twister'); [xbestDisc, fbestDisc, exitflagDisc] = ga(@cantileverVolumeWithDisc, ... 10, [], [], [], [], lb, ub, @cantileverConstraintsWithDisc, 1:6, opts);
ga stopped because it exceeded options.MaxGenerations.
Analyze the Results
xbestDisc(3:6) are returned from ga as integers (i.e. in their transformed state). We need to reverse the transform to retrieve the value in their engineering units.
xbestDisc = cantileverMapVariables(xbestDisc); display(xbestDisc);
xbestDisc =
Columns 1 through 7
3.0000 60.0000 3.1000 55.0000 2.6000 50.0000 2.2430
Columns 8 through 10
44.8603 1.8279 36.5593
As before, the solution returned from ga honors the constraint that and are integers. We can also see that , are chosen from the set [2.4, 2.6, 2.8, 3.1] cm and , are chosen from the set [45, 50, 55, 60] cm.
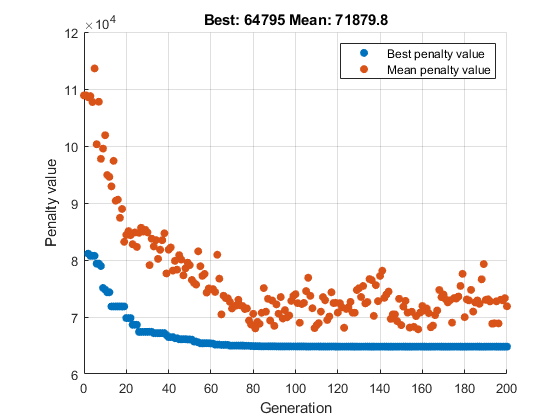
Recall that we have added additional constraints on the variables x(3), x(4), x(5) and x(6). As expected, when there are additional discrete constraints on these variables, the optimal solution has a higher minimum volume. Note further that the solution reported in [1] has a minimum volume of  and that we find a solution which is approximately the same as that reported in [1].
and that we find a solution which is approximately the same as that reported in [1].
fprintf('\nCost function returned by ga = %g\n', fbestDisc);
Cost function returned by ga = 64795
Summary
This example illustrates how to use the genetic algorithm solver, ga, to solve a constrained nonlinear optimization problem which has integer constraints. The example also shows how to handle problems that have discrete variables in the problem formulation.
References
[1] Thanedar, P. B., and G. N. Vanderplaats. "Survey of Discrete Variable Optimization for Structural Design." Journal of Structural Engineering 121 (3), 1995, pp. 301–306.
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)