iv4
ARX model estimation using four-stage instrumental variable method
Syntax
Description
Estimate ARX Polynomial Model
sys = iv4(tt,[na
nb nk])sys using the time-domain data in
the timetable tt. [na nb nk] specifies the ARX
structure orders of the A and B polynomials and the
input-to-output delay.
The software estimates sys using the four-stage instrumental
variable method. The estimation algorithm is insensitive to the color of the noise
term.
sys is an ARX model, which has the following form.
For more details on the ARX model structure, see arx.
sys = iv4(u,y,[na nb nk])u,y. The software assumes that the data sample
time is one second. To change the sample time, set Ts using
name-value syntax.
sys = iv4(data,[na nb nk])data. Use this syntax especially when you want to estimate a model
using frequency-domain or frequency-response data, or when you want to take advantage of
the additional information, such as data sample time or experiment labeling, that data
objects provide.
Specify Additional Options
sys = iv4(___,Name,Value)
You can use this syntax with any of the previous input-argument combinations.
Return Estimated Initial Conditions
[
returns the estimated initial conditions as an sys,ic] = iv4(___)initialCondition
object. For more information on ic, see the ic
argument description.
Use this syntax if you plan to simulate or predict the model response using the same estimation input data and then compare the response with the same estimation output data. Incorporating the initial conditions yields a better match during the first part of the simulation.
Examples
Estimate ARX Model Using Four-Stage Instrumental Variable Method
Load estimation data.
load sdata7.mat tt7
This data has two inputs, u1 and u2, and one output, y. Visualize y.
T = tt7.Properties.RowTimes; plot(T,tt7.y)
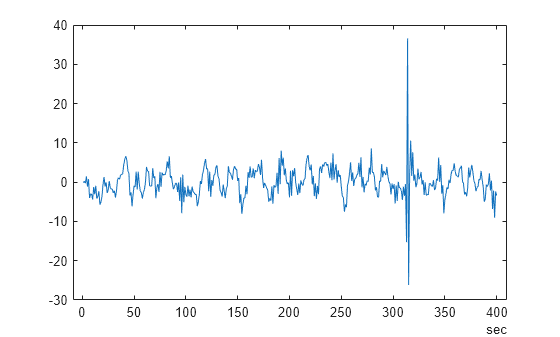
The plot shows a disturbance at around 314 seconds that should not be included in the estimation data.
Specify the ARX model orders, using the same orders for both inputs.
na = 4; nb = [2 2];
Specify a delay of 3 samples for input u1 and a delay of 1 sample for input u2.
nk = [3 1];
Estimate an ARX model using the four-stage instrumental variable method and the first 300 samples of data.
sys = iv4(tt7((1:300),:),[na nb nk])
sys =
Discrete-time ARX model: A(z)y(t) = B(z)u(t) + e(t)
A(z) = 1 - 0.1071 z^-1 - 0.9286 z^-2 + 0.07906 z^-3 + 0.4891 z^-4
B1(z) = 1.193 z^-3 + 1.241 z^-4
B2(z) = 0.655 z^-1 - 0.7329 z^-2
Sample time: 1 seconds
Parameterization:
Polynomial orders: na=4 nb=[2 2] nk=[3 1]
Number of free coefficients: 8
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using IV4 on time domain data.
Fit to estimation data: 64.76% (prediction focus)
FPE: 1.33, MSE: 1.228
Input Arguments
Output Arguments
Algorithms
Estimation is performed in 4 stages. The first stage uses the arx function. The resulting model generates the instruments for a second-stage
IV estimate. The residuals obtained from this model are modeled as a high-order AR model. At
the fourth stage, the input-output data is filtered through this AR model and then subjected
to the IV function with the same instrument filters as in the second stage.
For the multiple-output case, optimal instruments are obtained only if the noise sources at the different outputs have the same color. The estimates obtained with the routine are reasonably accurate, however, even in other cases.
References
[1] Ljung, Lennart. System Identification: Theory for the User, equations (15.21) through (15.26). 2nd ed. Prentice Hall Information and System Sciences Series. Upper Saddle River, NJ: Prentice Hall PTR, 1999.
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)