Find Image Rotation and Scale Using Automated Feature Matching
This example shows how to automatically determine the geometric transformation between a pair of images. When one image is distorted relative to another by rotation and scale, use detectSURFFeatures and estgeotform2d to find the rotation angle and scale factor. You can then transform the distorted image to recover the original image.
Step 1: Read Image
Bring an image into the workspace.
original = imread('cameraman.tif'); imshow(original); text(size(original,2),size(original,1)+15, ... 'Image courtesy of Massachusetts Institute of Technology', ... FontSize=7,HorizontalAlignment='right');

Step 2: Resize and Rotate the Image
scale = 0.7; J = imresize(original,scale); % Try varying the scale factor. theta = 30; % Note that imrotate rotates images in a counterclockwise direction when % you specify a positive angle of rotation. To rotate the image clockwise, % specify a negative theta. distorted = imrotate(J,-theta); % Try varying the angle, theta. figure imshow(distorted)

You can experiment by varying the scale and rotation of the input image. However, note that there is a limit to the amount you can vary the scale before the feature detector fails to find enough features.
Step 3: Find Matching Features Between Images
Detect features in both images.
ptsOriginal = detectSURFFeatures(original); ptsDistorted = detectSURFFeatures(distorted);
Extract feature descriptors.
[featuresOriginal,validPtsOriginal] = extractFeatures(original,ptsOriginal); [featuresDistorted,validPtsDistorted] = extractFeatures(distorted,ptsDistorted);
Match features by using their descriptors.
indexPairs = matchFeatures(featuresOriginal,featuresDistorted);
Retrieve locations of corresponding points for each image.
matchedOriginal = validPtsOriginal(indexPairs(:,1)); matchedDistorted = validPtsDistorted(indexPairs(:,2));
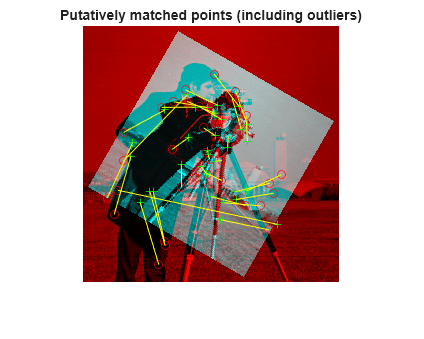
Show putative point matches.
figure
showMatchedFeatures(original,distorted,matchedOriginal,matchedDistorted);
title('Putatively matched points (including outliers)');
Step 4: Estimate Transformation
Find a transformation corresponding to the matching point pairs using the statistically robust M-estimator SAmple Consensus (MSAC) algorithm, which is a variant of the RANSAC algorithm. It removes outliers while computing the transformation matrix. You may see varying results of the transformation computation because of the random sampling employed by the MSAC algorithm.
[tform, inlierIdx] = estgeotform2d(matchedDistorted,matchedOriginal,'similarity');
inlierDistorted = matchedDistorted(inlierIdx,:);
inlierOriginal = matchedOriginal(inlierIdx,:);
Display matching point pairs used in the computation of the transformation.
figure; showMatchedFeatures(original,distorted,inlierOriginal,inlierDistorted); title('Matching points (inliers only)'); legend('ptsOriginal','ptsDistorted');

Step 5: Solve for Scale and Angle
Use the geometric transform, tform, to recover the scale and angle. Since we computed the transformation from the distorted to the original image, we need to compute its inverse to recover the distortion.
Let sc = s*cos(theta) Let ss = s*sin(theta)
Then, Ainv = [sc ss tx;
-ss sc ty;
0 0 1]where tx and ty are x and y translations, respectively.
Compute the inverse transformation matrix.
invTform = invert(tform); Ainv = invTform.A; ss = Ainv(1,2); sc = Ainv(1,1); scaleRecovered = hypot(ss,sc); disp(['Recovered scale: ', num2str(scaleRecovered)]) % Recover the rotation in which a positive value represents a rotation in % the clockwise direction. thetaRecovered = atan2d(-ss,sc); disp(['Recovered theta: ', num2str(thetaRecovered)])
Recovered scale: 0.70126 Recovered theta: 29.3451
The recovered values should match your scale and angle values selected in Step 2: Resize and Rotate the Image.
Note that the scale and rotation angle are also available in the Scale and RotationAngle properties of the simtform2d object.
disp(['Scale: ' num2str(invTform.Scale)]) disp(['RotationAngle: ' num2str(invTform.RotationAngle)])
Scale: 0.70126 RotationAngle: 29.3451
Step 6: Recover the Original Image
Recover the original image by transforming the distorted image.
outputView = imref2d(size(original)); recovered = imwarp(distorted,tform,OutputView=outputView);
Compare recovered to original by looking at them side-by-side in a montage.
figure, imshowpair(original,recovered,'montage')
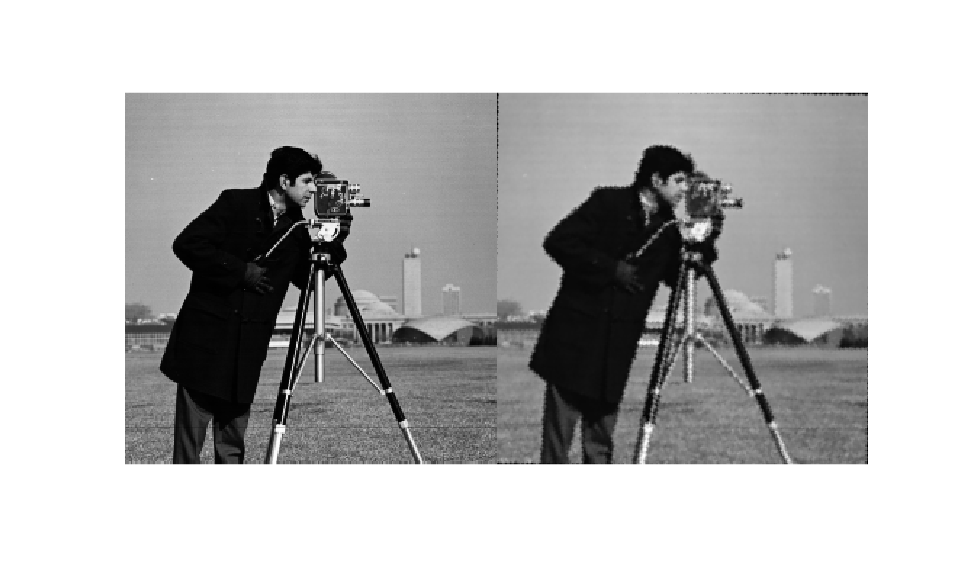
The recovered (right) image quality does not match the original (left) image because of the distortion and recovery process. In particular, the image shrinking causes loss of information. The artifacts around the edges are due to the limited accuracy of the transformation. If you were to detect more points in Step 3: Find Matching Features Between Images, the transformation would be more accurate. For example, we could have used a corner detector, detectFASTFeatures, to complement the SURF feature detector which finds blobs. Image content and image size also impact the number of detected features.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)