MapPostingsReference
Reference raster postings to map coordinates
Description
A map postings raster reference object contains information that describes the relationship between a planar map coordinate system and an intrinsic coordinate system that is anchored to the columns and rows of a 2-D spatially referenced grid of point samples (or postings).
Typically, the raster is sampled regularly in the planar world x- and world y-coordinates of the map system, such that the intrinsic x and world xaxes align and the intrinsic y and world y axes align. When this is true, the relationship between the two systems is rectilinear. More generally, and much more rarely, their relationship is affine. The affine relationship allows for a possible rotation (and skew). In either case, rectilinear or affine, the sample spacing from row to row need not equal the sample spacing from column to column.
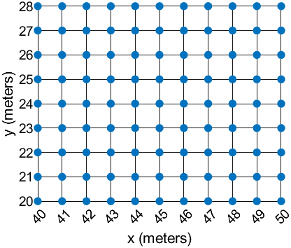
This image illustrates a 9-by-11 planar raster of postings. The postings are spaced 1 meter apart in x and y, cover x values in the range [40,50] in meters, and cover y values in the range [20,28] in meters. The boundary of the raster of postings is a rectangle with edges that pass through the outermost postings.
To reference a raster of cells to planar map coordinates, use a MapCellsReference object instead.
Creation
You can use these functions to create MapPostingsReference
objects:
readgeoraster— Import a raster data file as an array and a reference object.maprefpostings— Create a map raster reference object by specifying the x and y world limits of the raster and either the size of the raster or the spacing of the postings.maprasterref— Convert a world file to a map raster reference object.refmatToMapRasterReference— Convert a referencing matrix to a map raster reference object.
Properties
Object Functions
contains | Determine if geographic or map raster contains points |
cropToBlock | Crop raster reference object to row and column limits of raster |
firstCornerX | Return world x-coordinate of map raster index (1,1) |
firstCornerY | Return world y-coordinate of map raster index (1,1) |
intrinsicToWorld | Transform intrinsic to planar world coordinates |
sizesMatch | Determine if geographic or map raster object and image or raster are size-compatible |
worldFileMatrix | Return world file parameters for transformation |
worldGrid | World coordinates of raster elements |
worldToDiscrete | Transform planar world to discrete coordinates |
worldToIntrinsic | Transform planar world to intrinsic coordinates |
Examples
Display Planar Raster of Regularly Spaced Posting Points
Import elevation data as an array and a MapPostingsReference object. Then, display the data on a map.
For this example, specify the file to import by extracting a GZ file into a temporary directory. Then, set the name of the first extracted file to a variable.
filenames = gunzip('sanfranciscos.dem.gz',tempdir);
filename1 = filenames{1};Import the data by using the readgeoraster function. Prepare the data for plotting by specifying the output type as 'double' and by replacing missing data with NaN values.
[Z,R] = readgeoraster(filename1,'OutputType','double'); info = georasterinfo(filename1); Z = standardizeMissing(Z,info.MissingDataIndicator);
View the properties of the MapPostingsReference object.
R
R =
MapPostingsReference with properties:
XWorldLimits: [544050 555150]
YWorldLimits: [4164120 4178070]
RasterSize: [466 371]
RasterInterpretation: 'postings'
ColumnsStartFrom: 'north'
RowsStartFrom: 'west'
SampleSpacingInWorldX: 30
SampleSpacingInWorldY: 30
RasterExtentInWorldX: 11100
RasterExtentInWorldY: 13950
XIntrinsicLimits: [1 371]
YIntrinsicLimits: [1 466]
TransformationType: 'rectilinear'
CoordinateSystemType: 'planar'
ProjectedCRS: [1x1 projcrs]
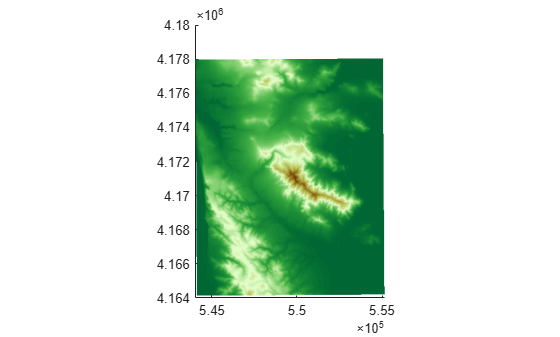
Display the elevation data as a surface on a map. Apply a colormap that is appropriate for elevation data.
mapshow(Z,R,'DisplayType','surface') demcmap(Z)
More About
Version History
Introduced in R2013b
See Also
Functions
Objects
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)