convexHull
(Not recommended) Convex hull of Delaunay triangulation
convexHull(DelaunayTri) is not recommended. Use convexHull(delaunayTriangulation) instead.
DelaunayTri is not recommended. Use delaunayTriangulation instead.
Description
Examples
Convex Hull of Random Points
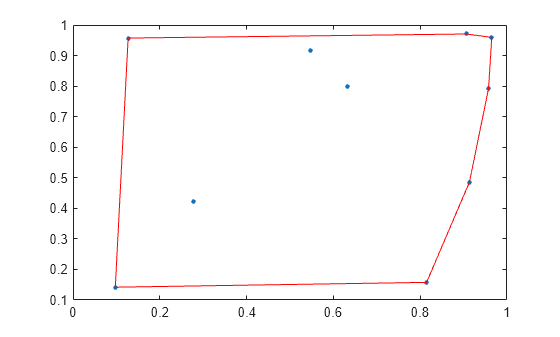
Compute the convex hull of a set of random points located within a unit square in 2-D space.
rng default
x = rand(10,1);
y = rand(10,1);
dt = DelaunayTri(x,y);
k = convexHull(dt);Plot the points and convex hull.
plot(dt.X(:,1),dt.X(:,2),'.','MarkerSize',10) hold on plot(dt.X(k,1),dt.X(k,2),'r') hold off
Convex Hull of 3-D Random Points
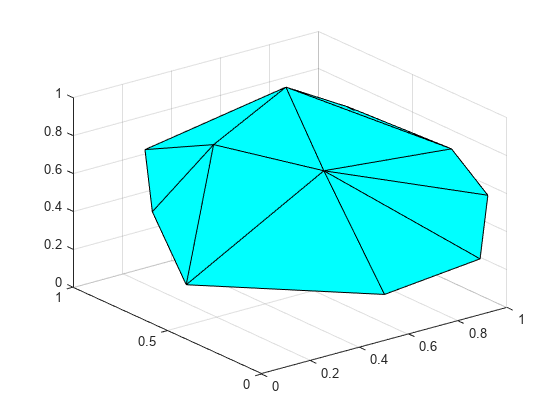
Compute the convex hull of a set of random points located within a unit cube in 3-D space. Specify two outputs with convexHull to also compute the volume bounded by the convex hull.
rng default
X = rand(25,3);
dt = DelaunayTri(X);
[ch,v] = convexHull(dt)ch = 30×3
2 9 13
2 12 18
2 13 12
2 14 25
2 18 14
2 23 9
2 25 23
5 7 22
5 10 7
5 18 10
⋮
v = 0.3943
Plot the convex hull.
trisurf(ch,dt.X(:,1),dt.X(:,2),dt.X(:,3),'FaceColor','cyan')
Input Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2009a
See Also
voronoiDiagram | delaunayTriangulation | triangulation | convhull | convhulln
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)