cartToBary
(Not recommended) Convert point coordinates from Cartesian to barycentric
cartToBary(TriRep) is not recommended. Use cartesianToBarycentric(triangulation) instead.
TriRep is not recommended. Use triangulation instead.
Syntax
Description
Examples
Stretch Triangulation and Map Incenters
Create a Delaunay triangulation for a set of points, calculate the location of the incenters, and then stretch the triangulation and compute the mapped locations of the incenters on the deformed triangulation.
Compute the Delaunay triangulation of a set of points.
x = [0 4 8 12 0 4 8 12]'; y = [0 0 0 0 8 8 8 8]'; dt = DelaunayTri(x,y)
dt =
DelaunayTri with properties:
X: [8x2 double]
Triangulation: [6x3 double]
Constraints: []
Compute the barycentric coordinates of the incenters.
cc = incenters(dt); tri = dt(:,:);
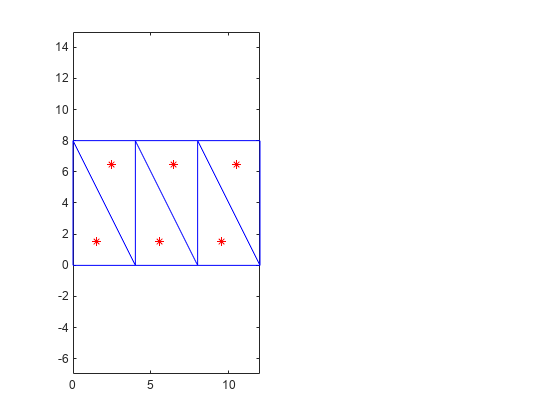
Plot the original triangulation and reference points.
subplot(1,2,1) triplot(dt) hold on plot(cc(:,1), cc(:,2), '*r') hold off axis equal
Stretch the triangulation and use baryToCart to compute the mapped locations of the incenters on the deformed triangulation.
b = cartToBary(dt,[1:length(tri)]',cc); y = [0 0 0 0 16 16 16 16]'; tr = TriRep(tri,x,y); xc = baryToCart(tr, [1:length(tri)]', b);
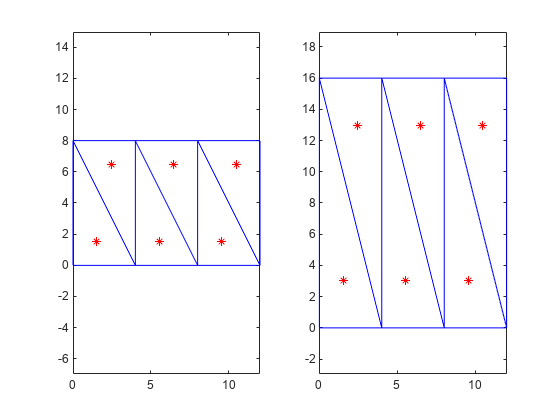
Plot the deformed triangulation and mapped locations of the reference points.
subplot(1,2,2) triplot(tr) hold on plot(xc(:,1), xc(:,2), '*r') hold off axis equal
Input Arguments
Output Arguments
More About
Version History
Introduced in R2009a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)