Specifying Alternative Cost Function with Off-Diagonal Weight Matrices
This example shows how to use non-diagonal output weight matrices in a model predictive controller.
Define Plant Model and MPC Controller
The linear plant model has two inputs and two outputs.
plant = ss(tf({1,1;1,2},{[1 .5 1],[.7 .5 1];[1 .4 2],[1 2]}));
[A,B,C,D] = ssdata(plant);
Ts = 0.1; % sampling time
plant = c2d(plant,Ts); % convert to discrete time
Create an MPC controller with prediction and control horizon of 20 and 2 steps, respectively.
mpcobj = mpc(plant,Ts,20,2);
-->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
Define constraints on the manipulated variables and their rates.
mpcobj.MV = struct('Min',{-3;-2},'Max',{3;2},'RateMin',{-100;-100},'RateMax',{100;100});
Specify non-diagonal output weights
To define non-diagonal output weights, you must select the alternative cost function instead of the standard cost function. The alternative cost function allows off-diagonal weighting, but requires the weights to be identical at each prediction horizon step. For more information on these cost function see Optimization Problem. To select the alternative cost function, you must specify the weight matrices in cell arrays. For more information, see the section on weights in mpc. Specify non-diagonal output weight, corresponding to ((y1-r1)-(y2-r2))^2.
OW = [1 -1]'*[1 -1];
mpcobj.Weights.OutputVariables = {OW};
Specify non-diagonal input weights
Non-diagonal input weight, corresponding to (u1-u2)^2.
mpcobj.Weights.ManipulatedVariables = {0.5*OW};
Simulate Using SIM Command
Specify simulation time and reference signal.
Tstop = 30; % simulation time Tf = round(Tstop/Ts); % number of simulation steps r = ones(Tf,1)*[1 2]; % reference trajectory
Run the closed-loop simulation.
[y,t,u] = sim(mpcobj,Tf,r);
-->Assuming output disturbance added to measured output #1 is integrated white noise. -->Assuming output disturbance added to measured output #2 is integrated white noise. -->"Model.Noise" is empty. Assuming white noise on each measured output.
Plot the results.
subplot(211) plot(t,y(:,1)-r(1,1)-y(:,2)+r(1,2));grid title('(y_1-r_1)-(y_2-r_2)'); subplot(212) plot(t,u);grid title('u');
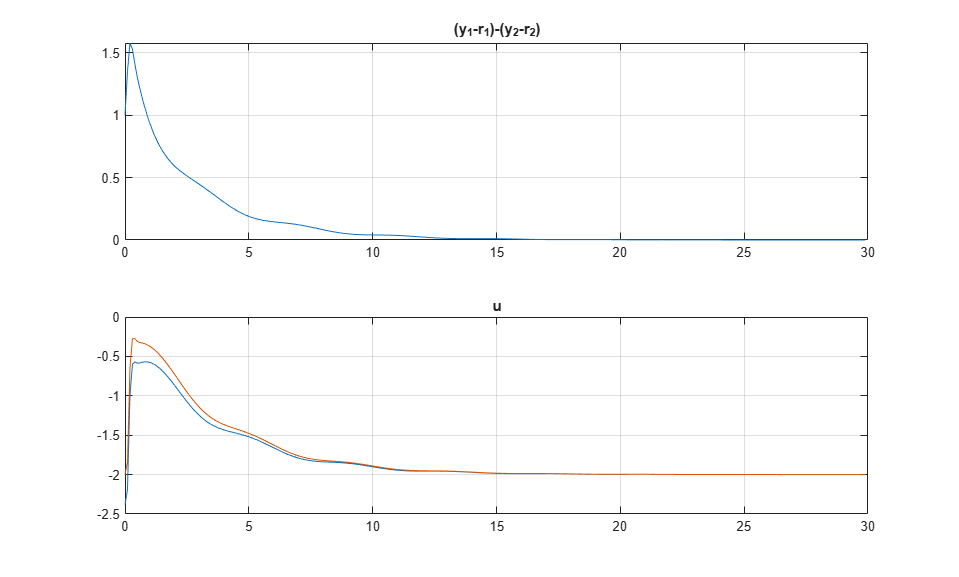
The difference between the two manipulated variable errors tends to zero.
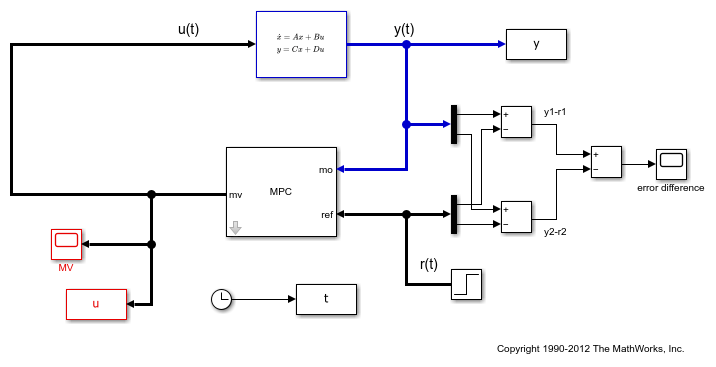
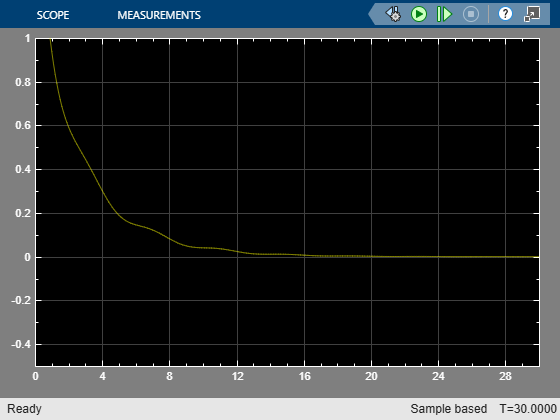
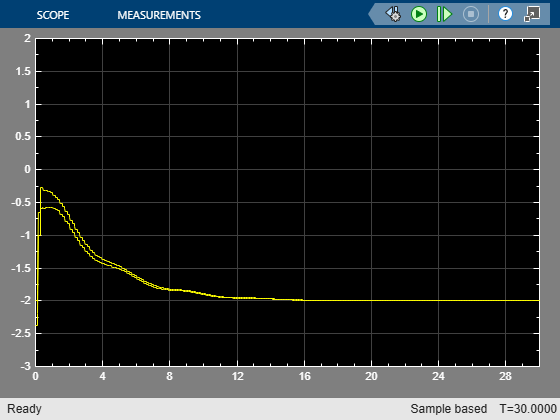
Simulate Using Simulink®
Now simulate closed-loop MPC in Simulink. As expected, results are identical.
mdl = 'mpc_weightsdemo';
open_system(mdl);
sim(mdl)
Close the simulink model.
bdclose(mdl);
See Also
Objects
Blocks
Related Examples
More About
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)