solvepde
Solve PDE specified in a PDEModel
Description
Examples
Solve a Stationary Problem: Poisson's Equation for the L-shaped Membrane
Create a PDE model, and include the geometry of the L-shaped membrane.
model = createpde(); geometryFromEdges(model,@lshapeg);
View the geometry with edge labels.
pdegplot(model,"EdgeLabels","on") ylim([-1.1,1.1]) axis equal
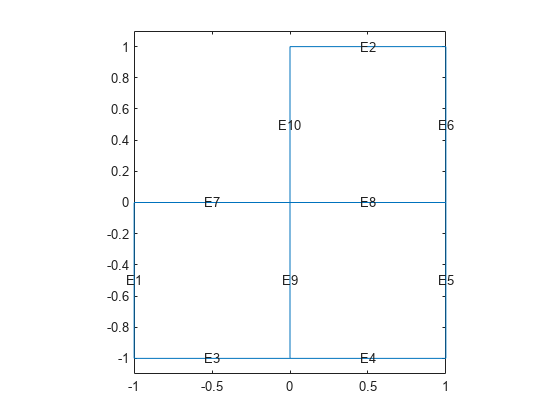
Set zero Dirichlet conditions on all edges.
applyBoundaryCondition(model,"dirichlet", ... "Edge",1:model.Geometry.NumEdges, ... "u",0);
Poisson's equation is
Toolbox solvers address equations of the form
Include the coefficients for Poisson's equation in the model.
specifyCoefficients(model,"m",0,... "d",0,... "c",1,... "a",0,... "f",1);
Mesh the model and solve the PDE.
generateMesh(model,"Hmax",0.25);
results = solvepde(model);View the solution.
pdeplot(model,"XYData",results.NodalSolution)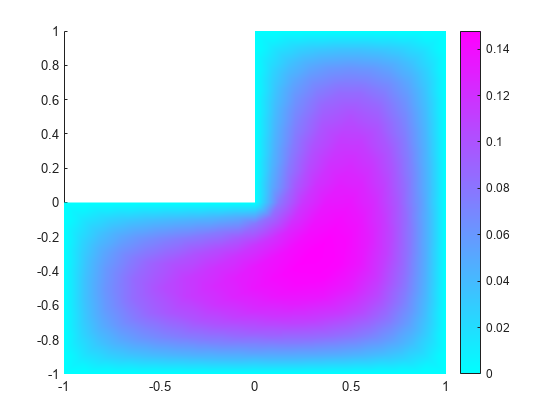
Solve a Time-Dependent Parabolic Equation with Nonconstant Coefficients
Create a model with 3-D rectangular block geometry.
model = createpde();
importGeometry(model,"Block.stl");Suppose that radiative cooling causes the solution to decrease as the cube of temperature on the surface of the block.
gfun = @(region,state)-state.u.^3*1e-6; applyBoundaryCondition(model,"neumann", ... "Face",1:model.Geometry.NumFaces, ... "g",gfun);
The model coefficients have no source term.
specifyCoefficients(model,"m",0,... "d",1,... "c",1,... "a",0,... "f",0);
The block starts at a constant temperature of 350.
setInitialConditions(model,350);
Mesh the geometry and solve the model for times 0 through 20.
generateMesh(model); tlist = 0:20; results = solvepde(model,tlist);
Plot the solution on the surface of the block at times 1 and 20.
pdeplot3D(model,"ColorMapData",results.NodalSolution(:,2))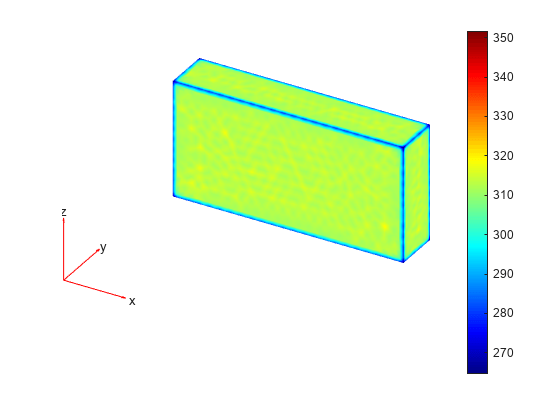
figure
pdeplot3D(model,"ColorMapData",results.NodalSolution(:,21))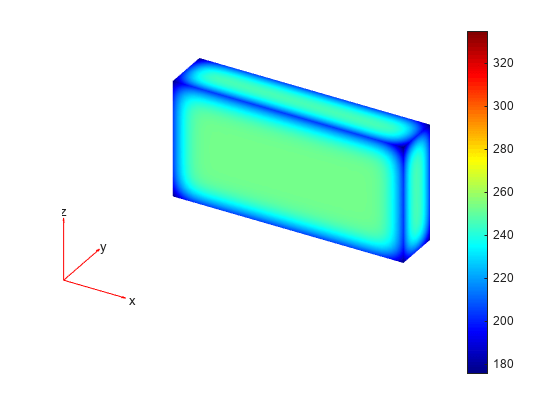
Input Arguments
Output Arguments
Tips
If the Newton iteration does not converge,
solvepdedisplays the error messageToo many iterationsorStepsize too small.If the initial guess produces matrices containing
NaNorInfelements,solvepdedisplays the error messageUnsuitable initial guess U0 (default: U0 = 0).If you have very small coefficients, or very small geometric dimensions,
solvepdecan fail to converge, or can converge to an incorrect solution. In this case, you might obtain better results by scaling the coefficients or geometry dimensions to be of order one.
Version History
Introduced in R2016a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)