azelaxes
Spherical basis vectors in 3-by-3 matrix form
Syntax
Description
Examples
Input Arguments
Output Arguments
More About
Spherical basis
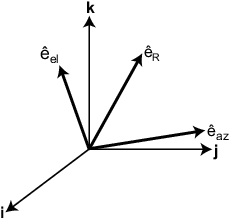
Spherical basis vectors are a local set of basis vectors which point along the radial and angular directions at any point in space.
The spherical basis vectors at the point (az,el) can be expressed in terms of the Cartesian unit vectors by
This set of basis vectors can be derived from the local Cartesian basis by two consecutive rotations: first by rotating the Cartesian vectors around the y-axis by the negative elevation angle, -el, followed by a rotation around the z-axis by the azimuth angle, az. Symbolically, we can write
The following figure shows the relationship between the spherical basis and the local Cartesian unit vectors.
Algorithms
MATLAB® computes the matrix A from
the equations
A = [cosd(el)*cosd(az), -sind(az), -sind(el)*cosd(az); ... cosd(el)*sind(az), cosd(az), -sind(el)*sind(az); ... sind(el), 0, cosd(el)];
Extended Capabilities
Version History
Introduced in R2013a
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)