GSC Beamformer
Generalized sidelobe canceller
Libraries:
Phased Array System Toolbox /
Beamforming
Description
The GSC Beamformerblock implements a generalized sidelobe cancellation (GSC) beamformer. A GSC beamformer splits an arrays incoming signals and sends them through a conventional beamformer path and a sidelobe canceling path. The algorithm first presteers the array to the beamforming direction and then adaptively chooses filter weights to minimize power at the output of the sidelobe canceling path. The algorithm uses least mean squares (LMS) to compute the adaptive weights. The final beamformed signal is the difference between the outputs of the two paths.
Ports
Input
Output
Parameters
Signal path FIR filter length — Length of the FIR filter along the signal path
1 (default) | positive integer
Length of the signal path FIR filter, specified as a positive integer. The FIR filter is a delta function.
Adaptive filter step size — LMS adaptive filter step size factor
0.1 (default) | positive scalar
The adaptive filter step size factor, specified as a positive scalar. This quantity, when divided by the total power in the sidelobe canceling path, determines the actual adaptive filter step size used by the LMS algorithm.
Source of beamforming direction — Source of beamforming direction
Property (default) | Input port
Source of beamforming direction, specified as Property
or Input port. When you set Source of
beamforming direction to Property, you
then set the direction using the Beamforming direction
(deg) parameter. When you select Input
port, the direction is determined by the input to the
Ang port.
Input Pattern Coordinate System — Coordinate system of custom antenna pattern
az-el (default) | phi-theta
Coordinate system of custom antenna pattern, specified
az-el or phi-theta. When you
specify az-el, use the Azimuth angles
(deg) and Elevations angles (deg) parameters to
specify the coordinates of the pattern points. When you specify
phi-theta, use the Phi angles (deg)
and Theta angles (deg) parameters to specify the coordinates of the
pattern points.
Dependencies
To enable this parameter, set Element type to
Custom Antenna.
Phi Angles (deg) — Phi angle coordinates of custom antenna radiation pattern
0:360 | real-valued 1-by-P row vector
Phi angles of points at which to specify the antenna radiation pattern, specify as a real-valued 1-by-P row vector. P must be greater than 2. Angle units are in degrees. Phi angles must lie between 0° and 360° and be in strictly increasing order.
Dependencies
To enable this parameter, set the Element type parameter to
Custom Antenna and the Input Pattern Coordinate
System parameter to phi-theta.
Theta Angles (deg) — Theta angle coordinates of custom antenna radiation pattern
0:180 | real-valued 1-by-Q row vector
Theta angles of points at which to specify the antenna radiation pattern, specify as a real-valued 1-by-Q row vector. Q must be greater than 2. Angle units are in degrees. Theta angles must lie between 0° and 360° and be in strictly increasing order.
Dependencies
To enable this parameter, set the Element type parameter to
Custom Antenna and the Input Pattern Coordinate
System parameter to phi-theta.
MatchArrayNormal — Rotate antenna element to array normal
on (default) | off
Select this check box to rotate the antenna element pattern to align with the array normal. When not selected, the element pattern is not rotated.
When the antenna is used in an antenna array and the Input Pattern Coordinate System parameter is az-el, selecting this check box rotates the pattern so that the x-axis of the element coordinate system points along the array normal. Not selecting uses the element pattern without the rotation.
When the antenna is used in an antenna array and Input Pattern Coordinate System is set to phi-theta, selecting this check box rotates the pattern so that the z-axis of the element coordinate system points along the array normal.
Use the parameter in conjunction with the Array normal parameter of the URA and UCA arrays.
Dependencies
To enable this parameter, set Element type to Custom Antenna.
Dimensions of a URA array, specified as a positive integer or 1-by-2 vector of positive integers.
If Array size is a 1-by-2 vector, the vector has the form
[NumberOfArrayRows,NumberOfArrayColumns].If Array size is an integer, the array has the same number of elements in each row and column.
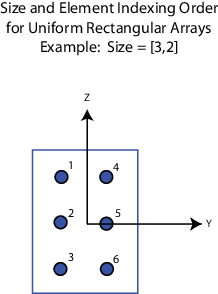
For a URA, array elements are indexed from top to bottom along the
leftmost array column, and continued to the next columns from left to right. In this
figure, the Array size value of [3,2] creates an
array having three rows and two columns.
Dependencies
To enable this parameter, set Geometry to
URA.
More About
Generalized Sidelobe Cancellation
The generalized sidelobe canceller (GSC) is an efficient implementation of a linear constraint minimum variance (LCMV) beamformer. LCMV beamforming minimizes the output power of an array while preserving the power in one or more specified directions. This type of beamformer is called a constrained beamformer. You can compute exact weights for the constrained beamformer but the computation is costly when the number of elements is large. The computation requires the inversion of a large spatial covariance matrix. The GSC formulation converts the adaptive constrained optimization LCMV problem into an adaptive unconstrained problem, which simplifies the implementation.
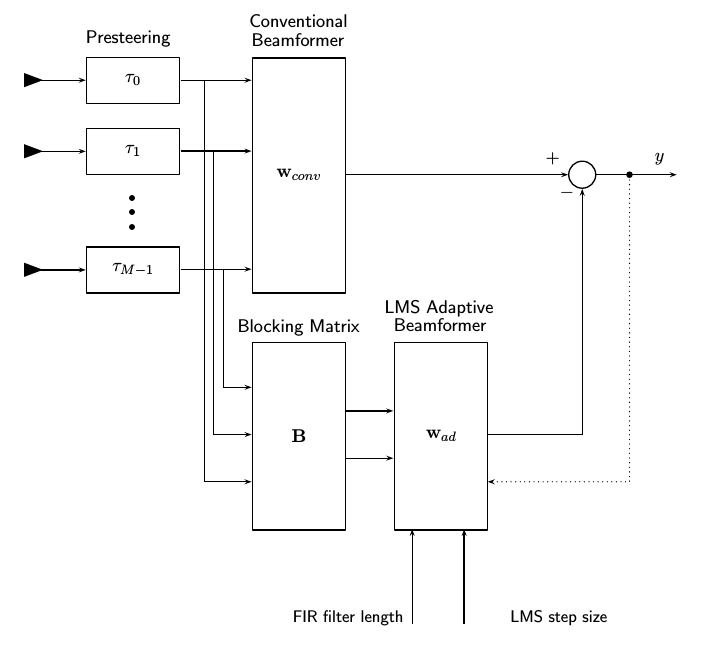
In the GSC algorithm, incoming sensor data is split into two signal paths as shown in the block diagram. The upper path is a conventional beamformer. The lower path is an adaptive unconstrained beamformer whose purpose is to minimize the GSC output power. The GSC algorithm consists of these steps:
Presteer the element sensor data by time-shifting the incoming signals. Presteering time-aligns all sensor element signals. The time shifts depend on the arrival angle of the signal.
Pass the presteered signals through the upper path into a conventional beamformer with fixed weights, wconv.
Also pass the presteered signals through the lower path into the blocking matrix, B. The blocking matrix is orthogonal to the signal and removes the signal from the lower path.
Filter the lower path signals through a bank of FIR filters. The
FilterLengthproperty sets the length of the filters. The filter coefficients are the adaptive filter weights, wad.Compute the difference between the upper and lower signal paths. This difference is the beamformed GSC output.
Feed the beamformed output back into the filter. Adapt the filter weights using a least mean-square (LMS) algorithm. The adaptive LMS step size is the quantity set by the
LMSStepSizeFactorproperty, divided by the total signal power.
Version History
Introduced in R2016b
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)