phased.TimeDelayLCMVBeamformer
Time delay LCMV beamformer
Description
The TimeDelayLCMVBeamformer object implements
a time-delay linear constraint minimum variance beamformer.
To compute the beamformed signal:
Define and set up your time-delay LCMV beamformer. See Construction.
Call
stepto perform the beamforming operation according to the properties ofphased.TimeDelayLCMVBeamformer. The behavior ofstepis specific to each object in the toolbox.
Note
Starting in R2016b, instead of using the step method
to perform the operation defined by the System object™, you can
call the object with arguments, as if it were a function. For example, y
= step(obj,x) and y = obj(x) perform
equivalent operations.
Construction
H = phased.TimeDelayLCMVBeamformer creates
a time-delay linear constraint minimum variance (LCMV) beamformer System object, H.
The object performs time delay LCMV beamforming on the received signal.
H = phased.TimeDelayLCMVBeamformer( creates
a time-delay LCMV beamformer object, Name,Value)H, with
each specified property Name set to the specified Value. You can specify
additional name-value pair arguments in any order as (Name1,Value1,...,NameN,ValueN).
Properties
|
Handle to sensor array Specify the sensor array as a handle. The sensor array must
be an array object in the Default: | ||||
|
Signal propagation speed Specify the propagation speed of the signal, in meters per second, as a positive scalar. You can specify this property as single or double precision. Default: Speed of light | ||||
|
Signal sampling rate Specify the signal sampling rate (in hertz) as a positive scalar. This property can be specified as single or double precision. Default: | ||||
|
FIR filter length Specify the length of the FIR filter behind each sensor element in the array as a positive integer. This property can be specified as single or double precision. Default: | ||||
|
Constraint matrix Specify the constraint matrix used for time-delay LCMV beamformer as an
M-by-K matrix. Each column of the
matrix is a constraint and M is the number of degrees of
freedom of the beamformer. For a time-delay LCMV beamformer, the number of
degrees of freedom is the product of the number of elements of the array and
the filter length specified by the value of the
Default: | ||||
|
Desired response vector Specify the desired response used for time-delay LCMV beamformer as a column vector of length
K, where K is the number of
constraints in the Default: | ||||
|
Diagonal loading factor Specify the diagonal loading factor as a positive scalar. Diagonal loading is a technique used to achieve robust beamforming performance, especially when the sample support is small. This property is tunable. This property can be specified as single or double precision. Default: | ||||
|
Add input to specify training data To specify additional training data, set this property to Default: | ||||
|
Source of beamforming direction Specify whether the beamforming direction comes from the
Default: | ||||
|
Beamforming direction Specify the beamforming direction of the beamformer as a column vector of length 2. The
direction is specified in the format of Default: | ||||
|
Output beamforming weights To obtain the weights used in the beamformer, set this property
to Default: |
Methods
| step | Perform time-delay LCMV beamforming |
| Common to All System Objects | |
|---|---|
release | Allow System object property value changes |
Examples
Time-Delay LCMV Beamformer
Apply a time delay LCMV beamformer to an 11-element acoustic ULA array. The elements are omnidirectional microphones. The incident angle of the signal is -50 degrees in azimuth and 30 degrees in elevation. The incident signal is an FM chirp with 500 Hz bandwidth. The propagation speed is a typical speed of sound in air, 340 m/s.
Simulate the signal and add noise.
nElem = 11; microphone = phased.OmnidirectionalMicrophoneElement(... 'FrequencyRange',[20 20000]); array = phased.ULA('Element',microphone,'NumElements',nElem,'ElementSpacing',0.04); fs = 8000; t = 0:1/fs:0.3; x = chirp(t,0,1,500); c = 340; collector = phased.WidebandCollector('Sensor',array,... 'PropagationSpeed',c,'SampleRate',fs,... 'ModulatedInput',false); incidentAngle = [-50;30]; x = collector(x.',incidentAngle); noise = 0.2*randn(size(x)); rx = x + noise;
Create and apply the time-delay LCMV beamformer. Specify a filterlength of 5.
filterLength = 5; constraintMatrix = kron(eye(filterLength),ones(nElem,1)); desiredResponseVector = eye(filterLength,1); beamformer = phased.TimeDelayLCMVBeamformer('SensorArray',array,... 'PropagationSpeed',c,'SampleRate',fs,'FilterLength',filterLength,... 'Direction',incidentAngle,'Constraint',constraintMatrix,... 'DesiredResponse',desiredResponseVector); y = beamformer(rx);
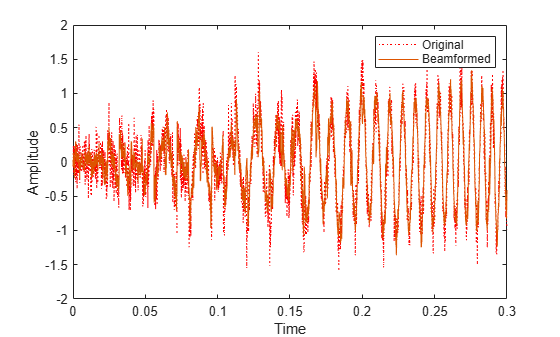
Compare the beamformer output to the input to the middle sensor.
plot(t,rx(:,6),'r:',t,y) xlabel('Time') ylabel('Amplitude') legend('Original','Beamformed')
Algorithms
References
[1] Frost, O. “An Algorithm For Linearly Constrained Adaptive Array Processing”, Proceedings of the IEEE. Vol. 60, Number 8, August, 1972, pp. 926–935.
[2] Van Trees, H. Optimum Array Processing. New York: Wiley-Interscience, 2002.
Extended Capabilities
Version History
Introduced in R2011a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)