URA Sum and Difference Monopulse
Sum-and-difference monopulse for URA
Library
Direction of Arrival (DOA)
phaseddoalib
Description
The URA Sum-and-Difference Monopulse block estimates the direction of arrival of a narrowband signal on a uniform rectangular array (URA) based on an initial guess using a sum-and-difference monopulse algorithm. The block obtains the difference steering vector by phase-reversing the latter half of the sum steering vector.
Parameters
- Signal Propagation speed (m/s)
Specify the propagation speed of the signal, in meters per second, as a positive scalar. You can use the function
physconstto specify the speed of light.- Operating frequency (Hz)
Specify the operating frequency of the system, in hertz, as a positive scalar.
- Number of bits in phase shifters
The number of bits used to quantize the phase shift component of beamformer or steering vector weights. Specify the number of bits as a non-negative integer. A value of zero indicates that no quantization is performed.
- Simulate using
Block simulation method, specified as
Interpreted ExecutionorCode Generation. If you want your block to use the MATLAB® interpreter, chooseInterpreted Execution. If you want your block to run as compiled code, chooseCode Generation. Compiled code requires time to compile but usually runs faster.Interpreted execution is useful when you are developing and tuning a model. The block runs the underlying System object™ in MATLAB. You can change and execute your model quickly. When you are satisfied with your results, you can then run the block using
Code Generation. Long simulations run faster than they would in interpreted execution. You can run repeated executions without recompiling. However, if you change any block parameters, then the block automatically recompiles before execution.When setting this parameter, you must take into account the overall model simulation mode. The table shows how the Simulate using parameter interacts with the overall simulation mode.
When the Simulink® model is in
Acceleratormode, the block mode specified using Simulate using overrides the simulation mode.Acceleration Modes
Block Simulation Simulation Behavior NormalAcceleratorRapid AcceleratorInterpreted ExecutionThe block executes using the MATLAB interpreter. The block executes using the MATLAB interpreter. Creates a standalone executable from the model. Code GenerationThe block is compiled. All blocks in the model are compiled. For more information, see Choosing a Simulation Mode (Simulink).
Array Parameters
- Specify sensor array as
Specify a ULA sensor array directly or by using a MATLAB expression.
Types
Array (no subarrays)MATLAB expression- Array size
Specify the size of the array as a positive integer or 1-by-2 vector of positive integers.
If Array size is a 1-by-2 vector, the vector has the form
[NumberOfArrayRows,NumberOfArrayColumns].If Array size is an integer, the array has the same number of rows and columns.
Elements are indexed from top to bottom along a column and continuing to the next columns from left to right. In this figure, an Array size of
[3,2]produces an array has three rows and two columns.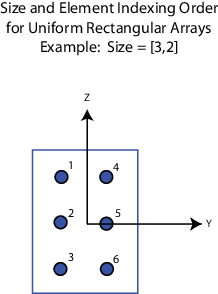
- Element spacing
Specify the element spacing of the array, in meters, as a 1-by-2 vector or a scalar. If Element spacing is a 1-by-2 vector, the vector has the form
[SpacingBetweenRows,SpacingBetweenColumns]. For a discussion of these quantities, seephased.URA. If Element spacing is a scalar, the spacings between rows and columns are equal.- Element lattice
Specify the element lattice as one of
RectangularorTriangular.Rectangular— Aligns all the elements in row and column directions.Triangular— Shifts the even-row elements of a rectangular lattice toward the positive-row axis direction. The elements are shifted a distance of half the element spacing along the row.
- Array normal,
This parameter appears when you set Geometry to
URAorUCA. Specify the Array normal asx,y, orz. All URA and UCA array elements are placed in the yz, zx, or xy-planes, respectively, of the array coordinate system.- Taper
Tapers, also known as element weights, are applied to sensor elements in the array. Tapers are used to modify both the amplitude and phase of the transmitted or received data.
Specify element tapering as a complex-valued scalar or complex-valued M-by-N matrix. In this matrix, M is the number of elements along the z-axis, and N is the number of elements along the y-axis. M and N correspond to the values of
[NumberofRows, NumberOfColumns]in the Array size matrix. IfTaperis a scalar, the same weight is applied to each element. If the value of Taper is a matrix, a weight from the matrix is applied to the corresponding sensor element. A weight must be applied to each element in the sensor array.- Expression
A valid MATLAB expression containing a constructor for a uniform rectangular array, for example,
phased.URA.
Sensor Array Tab: Element Parameters
- Element type
Specify antenna or microphone type as
Isotropic AntennaCosine AntennaCustom AntennaOmni MicrophoneCustom Microphone
- Exponent of cosine pattern
This parameter appears when you set Element type to
Cosine Antenna.Specify the exponent of the cosine pattern as a scalar or a 1-by-2 vector. You must specify all values as non-negative real numbers. When you set Exponent of cosine pattern to a scalar, both the azimuth direction cosine pattern and the elevation direction cosine pattern are raised to the specified value. When you set Exponent of cosine pattern to a 1-by-2 vector, the first element is the exponent for the azimuth direction cosine pattern and the second element is the exponent for the elevation direction cosine pattern.
- Operating frequency range (Hz)
This parameter appears when Element type is set to
Isotropic Antenna,Cosine Antenna, orOmni Microphone.Specify the operating frequency range, in hertz, of the antenna element as a 1-by-2 row vector in the form
[LowerBound,UpperBound]. The antenna element has no response outside the specified frequency range.- Operating frequency vector (Hz)
This parameter appears when Element type is set to
Custom AntennaorCustom Microphone.Specify the frequencies, in Hz, at which to set the antenna and microphone frequency responses as a 1-by-L row vector of increasing values. Use Frequency responses to set the frequency responses. The antenna or microphone element has no response outside the frequency range specified by the minimum and maximum elements of Operating frequency vector (Hz).
- Frequency responses (dB)
This parameter appears when Element type is set to
Custom AntennaorCustom Microphone.Specify this parameter as the frequency response of an antenna or microphone, in decibels, for the frequencies defined by Operating frequency vector (Hz). Specify Frequency responses (dB) as a 1-by-L vector matching the dimensions of the vector specified in Operating frequency vector (Hz).
- Input Pattern Coordinate System
Coordinate system of custom antenna pattern, specified
az-elorphi-theta. When you specifyaz-el, use the Azimuth angles (deg) and Elevations angles (deg) parameters to specify the coordinates of the pattern points. When you specifyphi-theta, use the Phi angles (deg) and Theta angles (deg) parameters to specify the coordinates of the pattern points.- Azimuth angles (deg)
This parameter appears when Element type is set to
Custom Antennaand the Input Pattern Coordinate System parameter is set toaz-el.Specify the azimuth angles at which to calculate the antenna radiation pattern as a 1-by-P row vector. P must be greater than 2. Angle units are in degrees. Azimuth angles must lie between –180° and 180° and be in strictly increasing order.
- Elevation angles (deg)
This parameter appears when Element type is set to
Custom Antennaand the Input Pattern Coordinate System parameter is set toaz-el.Specify the elevation angles at which to compute the radiation pattern as a 1-by-Q vector. Q must be greater than 2. Angle units are in degrees. Elevation angles must lie between –90° and 90° and be in strictly increasing order.
- Phi Angles (deg)
This parameter appears when Element type is set to
Custom Antennaand the Input Pattern Coordinate System parameter is set tophi-theta.Phi angles of points at which to specify the antenna radiation pattern, specify as a 1-by-P row vector. P must be greater than 2. Angle units are in degrees. Phi angles must lie between 0° and 360° and be in strictly increasing order.
- Theta Angles (deg)
This parameter appears when Element type is set to
Custom Antennaand the Input Pattern Coordinate System parameter is set tophi-theta.Theta angles of points at which to specify the antenna radiation pattern, specify as a 1-by-Q row vector. Q must be greater than 2. Angle units are in degrees. Theta angles must lie between 0° and 180° and be in strictly increasing order.
- Magnitude pattern (dB)
This parameter appears when the Element type is set to
Custom Antenna.Magnitude of the combined antenna radiation pattern, specified as a Q-by-P matrix or a Q-by-P-by-L array.
When the Input Pattern Coordinate System parameter is set to
az-el, Q equals the length of the vector specified by the Elevation angles (deg) parameter and P equals the length of the vector specified by the Azimuth angles (deg) parameter.When the Input Pattern Coordinate System parameter is set to
phi-theta, Q equals the length of the vector specified by the Theta Angles (deg) parameter and P equals the length of the vector specified by the Phi Angles (deg) parameter.
The quantity L equals the length of the Operating frequency vector (Hz).
If this parameter is a Q-by-P matrix, the same pattern is applied to all frequencies specified in the Operating frequency vector (Hz) parameter.
If the value is a Q-by-P-by-L array, each Q-by-P page of the array specifies a pattern for the corresponding frequency specified in the Operating frequency vector (Hz) parameter.
- Phase pattern (dB)
This parameter appears when the Element type is set to
Custom Antenna.Phase of the combined antenna radiation pattern, specified as a Q-by-P matrix or a Q-by-P-by-L array.
When the Input Pattern Coordinate System parameter is set to
az-el, Q equals the length of the vector specified by the Elevation angles (deg) parameter and P equals the length of the vector specified by the Azimuth angles (deg) parameter.When the Input Pattern Coordinate System parameter is set to
phi-theta, Q equals the length of the vector specified by the Theta Angles (deg) parameter and P equals the length of the vector specified by the Phi Angles (deg) parameter.
The quantity L equals the length of the Operating frequency vector (Hz).
If this parameter is a Q-by-P matrix, the same pattern is applied to all frequencies specified in the Operating frequency vector (Hz) parameter.
If the value is a Q-by-P-by-L array, each Q-by-P page of the array specifies a pattern for the corresponding frequency specified in the Operating frequency vector (Hz) parameter.
If this parameter is a Q-by-P matrix, the same pattern is applied to all frequencies specified in the Operating frequency vector (Hz) parameter.
If the value is a Q-by-P-by-L array, each Q-by-P page of the array specifies a pattern for the corresponding frequency specified in the Operating frequency vector (Hz) parameter.
- MatchArrayNormal
This parameter appears when the Element type is set to
Custom Antenna.Select this check box to rotate the antenna element pattern to align with the array normal. When not selected, the element pattern is not rotated.
When the antenna is used in an antenna array and the Input Pattern Coordinate System parameter is
az-el, selecting this check box rotates the pattern so that the x-axis of the element coordinate system points along the array normal. Not selecting uses the element pattern without the rotation.When the antenna is used in an antenna array and Input Pattern Coordinate System is set to
phi-theta, selecting this check box rotates the pattern so that the z-axis of the element coordinate system points along the array normal.Use the parameter in conjunction with the Array normal parameter of the
URAandUCAarrays.- Polar pattern frequencies (Hz)
This parameter appears when the Element type is set to
Custom Microphone.Specify the measuring frequencies of the polar patterns as a 1-by-M vector. The measuring frequencies lie within the frequency range specified by the Operating frequency vector (Hz) parameter. Frequency units are in Hz.
- Polar pattern angles (deg)
This parameter appears when Element type is set to
Custom Microphone.Specify the measuring angles of the polar patterns, as a 1-by-N vector. The angles are measured from the central pickup axis of the microphone, and must be between –180° and 180°, inclusive.
- Polar pattern (dB)
This parameter appears when Element type is set to
Custom Microphone.Specify the magnitude of the microphone element polar pattern as an M-by-N matrix. M is the number of measuring frequencies specified in Polar pattern frequencies (Hz). N is the number of measuring angles specified in Polar pattern angles (deg). Each row of the matrix represents the magnitude of the polar pattern measured at the corresponding frequency specified in Polar pattern frequencies (Hz) and all angles specified in Polar pattern angles (deg). Assume that the pattern is measured in the azimuth plane. In the azimuth plane, the elevation angle is 0° and the central pickup axis is 0° degrees azimuth and 0° degrees elevation. Assume that the polar pattern is symmetric around the central axis. You can construct the microphone’s response pattern in 3-D space from the polar pattern.
- Baffle the back of the element
This check box appears only when the Element type parameter is set to
Isotropic AntennaorOmni Microphone.Select this check box to baffle the back of the antenna element. In this case, the antenna responses to all azimuth angles beyond ±90° from broadside are set to zero. Define the broadside direction as 0° azimuth angle and 0° elevation angle.
Ports
Note
The block input and output ports correspond to the input and
output parameters described in the step method of
the underlying System object. See link at the bottom of this page.
| Port | Description | Supported Data Types |
|---|---|---|
X | Input signal. The size of the first dimension of the input matrix can vary to simulate a changing signal length. A size change can occur, for example, in the case of a pulse waveform with variable pulse repetition frequency. | Double-precision floating point |
Steer | Initial estimate of arrival directions. | Double-precision floating point |
Ang | Estimate of arrival directions. | Double-precision floating point |
Version History
Introduced in R2014b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)