Valve Actuator
(To be removed) Simplified model of valve driver
The Hydraulics (Isothermal) library will be removed in a future release. Use the Isothermal Liquid library instead. (since R2020a)
For more information on updating your models, see Upgrading Hydraulic Models to Use Isothermal Liquid Blocks.
Library
Valve Actuators

Description
The Valve Actuator block represents a simplified model of a valve actuator, which is especially suitable for real-time and HIL (hardware-in-the-loop) simulation. Its functionality is similar to the 2-Position Valve Actuator and 3-Position Valve Actuator blocks, but its characterization requires fewer parameters because it is built of components that are practically linear.
The Valve Actuator block is built using the blocks from the Simscape™ Physical Signals library. Both the input and the output of the block are physical signals. The block diagram of the model is shown in the following figure.

The gain of the PS Gain 1 block establishes the steady-state relationship between the input and output signals. The PS Saturation block keeps the output signal within the +/– valve stroke range. The gain of the PS Gain 2 block is 1/Time constant, which makes it possible to reproduce the first-order lag by combining this block with the PS Subtract and PS Integrator blocks.
The transfer function of the lag is
where T is the time constant. The gain of the PS Gain 3 block is set to 1.
Note
This block is constructed out of blocks from the Simscape Physical Signals library (such as PS Add, PS Gain, and so on). Currently, the blocks in the Physical Signals library do not support unit propagation and checking. For more information, see How to Work with Physical Units.
Dialog Box and Parameters
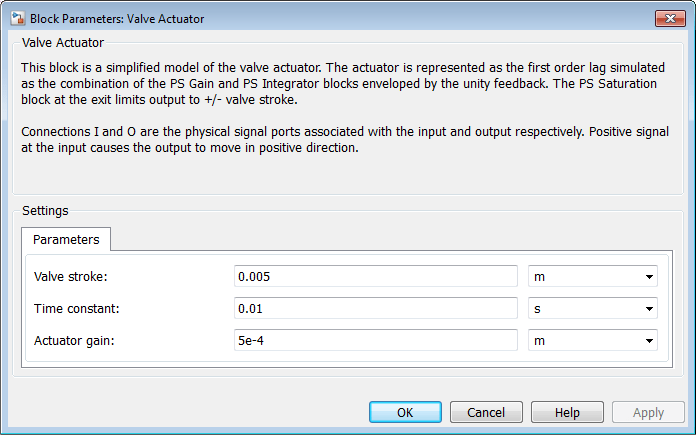
- Valve stroke
The desired valve stroke, which defines the saturation level of the PS Saturation block in the actuator model. The output of the actuator is kept within the +/– valve stroke range. The default value is
0.005m.- Time constant
Time constant of the first-order lag. The Gain parameter of the PS Gain 2 block is equal to 1/Time constant. The default value is
0.01s.- Actuator gain
Gain of the PS Gain 1 block in the block diagram of the actuator model. The default value is
5e-4m.
Ports
The block has one physical signal input port and one physical signal output port.
Extended Capabilities
Version History
Introduced in R2010aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)