Couple Three Spinning Inertias with a Planetary Gear
You can modify the gear model from the Couple Two Spinning Inertias with a Simple Gear example and use it as a starting point for studying complex gear sets. One of the most important complex gear sets is the planetary gear, which has three wheels, the ring, the sun, and the planet, all held in place by a common carrier body. The planetary gear is important because it is a common component in complex, realistic transmissions.
Start with the simple gear model you built or by opening the
SimpleGearmodel.Replace the Simple Gear in your the model with a Planetary Gear from the Simscape™ Driveline™ block library. A planetary gear splits input angular motion from the carrier between the ring and sun wheels, each connected to their respective bodies.
Copy the Sensor (Follower) subsystem, the connected Inertia block, and a From block.
Rename the sensor subsystems to match the gears that they attach to: carrier, ring, and sun. Rename the signals on the Goto and From block tags to match the gears that the signals represent:
For the carrier gear, rename the tags signals as wC and tC.
For the ring gear, rename the tags signals as wR and tR.
For the sun gear, rename the tags signals as wS and tS.
Add an input to each of the two Mux blocks.
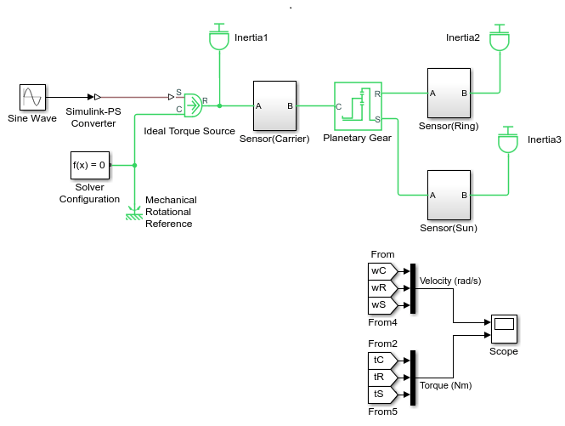
Connect the blocks to form the new diagram as shown in the figure.
Simple Planetary Gear Model
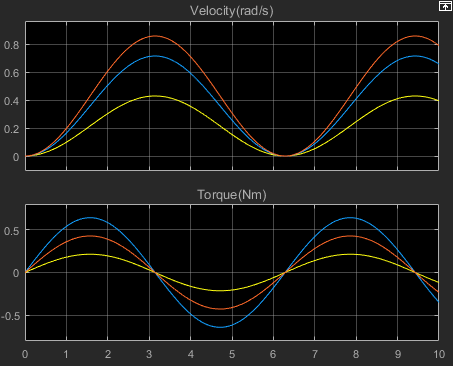
Open the Scope and start the simulation to observe the angular velocities of the ring, carrier, and sun, from largest to smallest. The ratio of the ring to sun gear velocities is always 2.
To see the ring and sun wheels spinning alone, you must lock the carrier. To do so:
Delete the Inertia1 block and the associated connector.
Delete the connector between the Ideal Torque Sourceblock and the Sensor (Carrier) subsystem.
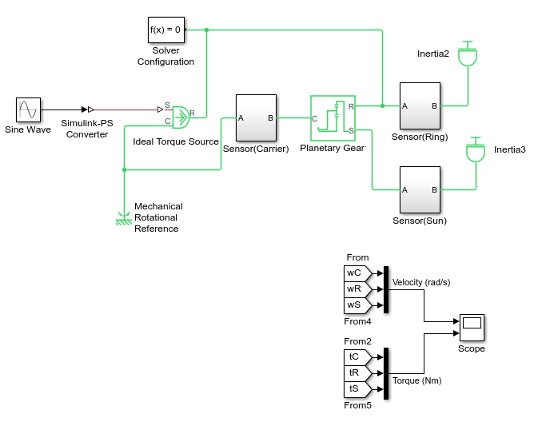
Connect the Sensor (Carrier) subsystem to the connector between the Mechanical Rotational Reference block and the Ideal Torque Source block.
Connect the Ideal Torque Source block to the connector between the Planetary Gear block and the Sensor (Ring) subsystem.
Delete the connector that connects the Solver Configuration block to the connector between the Mechanical Rotational Reference block and the Ideal Torque Source block.
Reposition the Solver Configuration block.
Connect the Solver Configuration block to the connector between the Ideal Torque Source block and the Sensor (Ring) subsystem.
Simple Planetary Gear Model with Locked Carrier
Open the Scope and start your model. Observe the angular velocities of the ring, carrier, and sun.
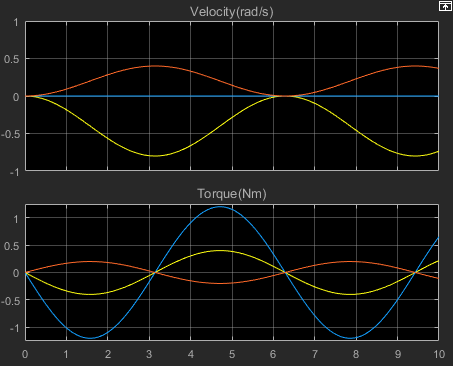
The carrier, connected to Mechanical Rotational Reference, does not move. The ring is driven with a sinusoidal torque, and the sun responds by spinning in the opposite direction (ring and sun gear wheels are external to one another) at twice the rate. The ring wheel has twice the radius (or twice the number of teeth) as the sun, so it spins half as fast.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)