simscape.logging.Node
Hierarchy tree for simulation data
Description
simscape.logging.Node represents the hierarchy of nodes for
logging simulation data in a model. The tree starts with the workspace variable, which
represents simulation data for the whole model, and recursively creates nodes for each of the
children.
The children depend on the type of the parent node:
For the top-level simulation log workspace variable, the children are all the Simscape™ blocks (and subsystems containing Simscape blocks) in the top-level model diagram.
For a subsystem or a structural block, the children are all the constituent Simscape blocks and subsystems.
For a block, the children are all its physical ports, Through and Across variables, and all internal variables defined in the block's Simscape file.
For a physical port, the children are all its Across variables.
Final nodes in this recursion correspond to all the variables logged for the model. Final nodes do not have children nodes, and contain the series data logged during simulation.
Creation
This object is created automatically during simulation, as part of the simulation log workspace variable, if you enable data logging for the model.
Properties
Object Functions
Examples
Plot Block Velocities
Plot complete logging tree for a model, and then plot velocities of all the blocks in the model.
Consider the following model. The model name is simple_mech2, and
data logging is enabled with the default workspace variable name,
simlog.
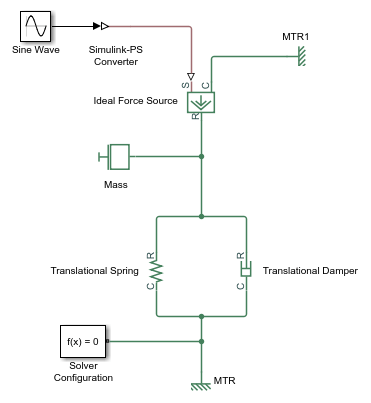
Print the complete logging tree for the model:
print(simlog)
simple_mech2
+-Ideal_Force_Source
| +-C
| | +-v
| +-R
| | +-v
| +-S
| +-f
| +-v
+-MTR
| +-V
| | +-v
| +-f
+-MTR1
| +-V
| | +-v
| +-f
+-Mass
| +-M
| | +-v
| +-f
+-Simulink_PS_Converter
+-Translational_Damper
| +-C
| | +-v
| +-R
| | +-v
| +-f
| +-v
+-Translational_Spring
+-C
| +-v
+-R
| +-v
+-f
+-v
+-xPlot velocities of all the blocks in the model:
plot(simlog,'units','m/s','depth',2)
This command filters simulation data in two ways. It plots only series that are
commensurate with units m/s (that is, velocities), based on the
units argument. And because of the depth
argument, it plots only those velocity variables that are associated with the block
itself. If you refer to the logging tree, only the Ideal Force Source, Translational
Damper, and Translational Spring blocks have a velocity (v) variable
at the second level. Because of the depth argument, velocities of
the block ports (one level down) do not get plotted.
Version History
Introduced in R2010b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)