Planar Joint
Joint with one rotational and two translational degrees of freedom

Libraries:
Simscape /
Multibody /
Joints
Description
The Planar Joint block provides one rotational and two translational degrees of freedom between two frames.
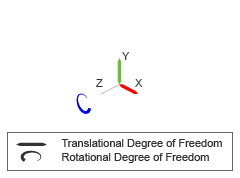
The block constrains the origin of the follower frame to the x-y plane of the base frame and the relative transformation of the follower frame follows this order:
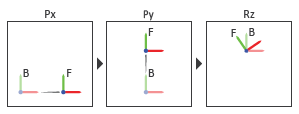
First, the follower frame moves along the x and y axes of the base frame, respectively, and then rotates about the z-axis of the follower frame generated after the translations.
To specify the target of the initial state for a joint primitive, use the parameters under State Targets. The targets are specified in the base frame. You can also set the priority levels for the targets. If the joint is not able to satisfy all the state targets, the priority level determines which targets to satisfy first and how closely to satisfy them. For an example, see Guiding Assembly.
To model damping and spring behavior for a joint primitive, use the parameters under Internal Mechanics. Use the Damping Coefficient parameter to model energy dissipation and the Spring Stiffness parameter to model energy storage. Joint springs attempt to displace the joint primitive from its equilibrium position. Joint dampers act as energy dissipation elements. The springs and dampers are strictly linear.
To specify the limits of a joint primitive, use the parameters under Limits. The lower and upper bounds define the width of the free region. The block applies a force to accelerate the joint position back to the free region when the position exceeds the bounds. The block uses a smoothed spring-damper method to compute the force. For more information about the smoothed spring-damper method, see the Description section of the Spatial Contact Force block.
The Force, Torque, and Motion parameters in the Actuation section govern the motion of a joint primitive during simulation. For more information, see Specifying Joint Actuation Inputs. Additionally, the joint block has ports that output sensing data, such as position, velocity, acceleration, force, and torque, that you can use to perform analytical tasks on a model. For more information, see Sensing and Force and Torque Sensing.
To specify the joint mode configuration, use the Mode parameter. For more details, see Motion Configuration under the Parameters and Ports sections.

Ports
Frame
B — Base frame
frame
Base frame of the joint block.
F — Follower frame
frame
Follower frame of the joint block.
Input
fx — Actuation force
physical signal
Physical signal input port that accepts the actuation force for the joint primitive. The block applies the force equally and oppositely to the base and follower frames of the joint along the x-axis of the base frame.
Dependencies
To enable this port, under X Prismatic Primitive (Px) > Actuation, set Force to Provided by Input.
px — Motion profile
physical signal
Physical signal input port that accepts the motion profile for the joint primitive. The block uses this signal to determine the displacement of the follower frame with respect to the base frame along the x-axis of the base frame. The signal must also contain the first and second derivatives of the displacement.
Dependencies
To enable this port, under X Prismatic Primitive (Px) > Actuation, set Motion to Provided by Input.
fy — Actuation force
physical signal
Physical signal input port that accepts the actuation force for the joint primitive. The block applies this force equally and oppositely to the base and follower frames of the joint along the y-axis of the base frame.
Dependencies
To enable this port, under Y Prismatic Primitive (Py) > Actuation, set Force to Provided by Input.
py — Motion profile
physical signal
Physical signal input port that accepts the motion profile for the joint primitive. The block uses this signal to determine the displacement of the follower frame with respect to the base frame along the y-axis of the base frame. The signal must also contain the first and second derivatives of the displacement.
Dependencies
To enable this port, under Y Prismatic Primitive (Py) > Actuation, set Motion to Provided by Input.
tz — Actuation torque
physical signal
Physical signal input port that accepts the actuation torque for the joint primitive. The block applies this torque equally and oppositely to both the base and follower frames of the joint primitive. The torque is about the z-axis of the base frame. The z-axes of the follower and base frames align with each other during simulation.
Dependencies
To enable this port, under Z Revolute Primitive (Rz) > Actuation, set Torque to Provided by Input.
qz — Motion profile
physical signal
Physical signal input port that accepts the motion profile for the joint primitive. The block uses this signal to determine the rotation of the follower frame with respect to the base frame about the z-axis of the base frame. The signal must also contain the first and second derivatives of the rotation.
Dependencies
To enable this port, under Z Revolute Primitive (Rz) > Actuation, set Motion to Provided by Input.
mode — Joint mode control
scalar
Input port that controls the mode of the joint. The signal is a unitless scalar. The joint mode is normal when the input signal is 0, disengaged when the input signal is -1, and locked when the input signal is 1. You can change the modes at any time during simulation.
The table shows how the position and velocity of a joint change during the transitions between modes.
| Transitions | Position | Velocity |
|---|---|---|
| Normal to Locked | The joint position retains the current value and remains constant. | The joint velocity becomes zero and remains constant. |
| Normal to Disengaged | The joint position maintains the current value until a force or torque causes a change. | The joint velocity remains at the current value until a force or torque causes a change. |
| Locked to Normal | The joint position remains at the current value until a force or torque causes a change. | The joint velocity remains at zero until a force or torque causes a change. |
| Locked to Disengaged | The joint position remains at the current value until a force or torque causes a change. | The joint velocity remains at zero until a force or torque causes a change. |
| Disengaged to Normal | For the directions aligned with the joint degrees of freedom (DOFs), the joint primitive positions adopt the value calculated through Newton's method. These positions retain their values until a force or torque initiates a change. In the constrained directions, the joint primitive positions become zero and remain constant. | For the directions aligned with the joint DOFs, the joint primitive velocities maintain the current values until a force or torque initiates a change. In the constrained directions, the joint primitive velocities become zero and remain constant. |
| Disengaged to Locked | For the directions aligned with the joint DOFs, the joint primitive positions adopt the value calculated through Newton's method and remain constant. In the constrained directions, the joint primitive positions become zero and remain constant. | The joint velocity becomes zero and remain constant. |
Dependencies
To enable this port, under Mode Configuration, set Mode to Provided by Input.
Output
px — Position of primitive
physical signal
Physical signal port that outputs the position of the joint primitive. The value is the displacement of the follower frame with respect to the base frame in the x-direction of the base frame.
Dependencies
To enable this port, under X Prismatic Primitive (Px) > Sensing, select Position.
vx — Velocity of primitive
physical signal
Physical signal port that outputs the velocity of the joint primitive. The value is the first derivative of the signal from the port px.
Dependencies
To enable this port, under X Prismatic Primitive (Px) > Sensing, select Velocity.
ax — Acceleration of primitive
physical signal
Physical signal port that outputs the acceleration of the joint primitive. The value is the second derivative of the signal from the port px.
Dependencies
To enable this port, under X Prismatic Primitive (Px) > Sensing, select Acceleration.
fx — Actuator force acting on joint primitive
physical signal
Physical signal port that outputs the actuator force acting on the joint primitive.
Dependencies
To enable this port, under X Prismatic Primitive (Px) > Sensing, select Actuator Force.
fllx — Lower-limit force
physical signal
Physical signal port that outputs the lower-limit force. The block applies this force when the joint primitive position is less than the lower bound of the free region. The block applies this force to both the base and follower frames of the joint primitive in order to accelerate the relative position back to the free region.
Dependencies
To enable this port, under X Prismatic Primitive (Px) > Sensing, select Lower-Limit Force.
fulx — Upper-limit force
physical signal
Physical signal port that outputs the upper-limit force. The block applies this force when the joint primitive position exceeds the upper bound of the free region. The block applies this force to both the base and follower frames of the joint primitive in order to accelerate the relative position back to the free region.
Dependencies
To enable this port, under X Prismatic Primitive (Px) > Sensing, select Upper-Limit Force.
py — Position of primitive
physical signal
Physical signal port that outputs the position of the joint primitive. The value is the displacement of the follower frame with respect to the base frame in the y-direction of the base frame.
Dependencies
To enable this port, under Y Prismatic Primitive (Py) > Sensing, select Position.
vy — Velocity of primitive
physical signal
Physical signal port that outputs the velocity of the joint primitive. The value is the first derivative of the signal from the port py.
Dependencies
To enable this port, under Y Prismatic Primitive (Py) > Sensing, select Velocity.
ay — Acceleration of primitive
physical signal
Physical signal port that outputs the acceleration of the joint primitive. The value is the second derivative of the signal from the port py.
Dependencies
To enable this port, under Y Prismatic Primitive (Py) > Sensing, select Acceleration.
fy — Actuator force acting on joint primitive
physical signal
Physical signal port that outputs the actuator force acting on the joint primitive.
Dependencies
To enable this port, under Y Prismatic Primitive (Py) > Sensing, select Actuator Force.
flly — Lower-limit force
physical signal
Physical signal port that outputs the lower-limit force. The block applies this force when the joint primitive position is less than the lower bound of the free region. The block applies this force to both the base and follower frames of the joint primitive in order to accelerate the relative position back to the free region.
Dependencies
To enable this port, under Y Prismatic Primitive (Py) > Sensing, select Lower-Limit Force.
fuly — Upper-limit force
physical signal
Physical signal port that outputs the upper-limit force. The block applies this force when the joint primitive position exceeds the upper bound of the free region. The block applies this force to both the base and follower frames of the joint primitive in order to accelerate the relative position back to the free region.
Dependencies
To enable this port, under Y Prismatic Primitive (Py) > Sensing, select Upper-Limit Force.
qz — Position of joint primitive
physical signal
Physical signal port that outputs the position of the joint primitive. The value is the rotation angle of the follower frame with respect to the base frame about the z-axis of the base frame.
Dependencies
To enable this port, under Z Revolute Primitive (Rz) > Sensing, select Position.
wz — Angular velocity of joint primitive
physical signal
Physical signal port that outputs the angular velocity of the joint primitive. The value is the first derivative of the signal from the port qz.
Dependencies
To enable this port, under Z Revolute Primitive (Rz) > Sensing, select Velocity.
bz — Angular acceleration of joint primitive
physical signal
Physical signal port that outputs the angular acceleration of the joint primitive. The value is the second derivative of the signal from the port qz.
Dependencies
To enable this port, under Z Revolute Primitive (Rz) > Sensing, select Acceleration.
tz — Actuator torque acting on joint primitive
physical signal
Physical signal port that outputs the actuator torque acting on the joint primitive.
Dependencies
To enable this port, under Z Revolute Primitive (Rz) > Sensing, select Actuator Torque.
tllz — Lower-limit torque acting on joint primitive
physical signal
Physical signal port that outputs the lower-limit torque. The block applies this torque when the joint primitive position is less than the lower bound of the free region. The block applies this torque to both the base and follower frames of the joint primitive in order to accelerate the relative position back to the free region.
Dependencies
To enable this port, under Z Revolute Primitive (Rz) > Sensing, select Lower-Limit Torque.
tulz — Upper-limit torque acting on joint primitive
physical signal
Physical signal port that outputs the upper-limit torque. The block applies this torque when the joint primitive position exceeds the upper bound of the free region. The block applies this torque to both the base and follower frames of the joint primitive in order to accelerate the relative position back to the free region.
Dependencies
To enable this port, under Z Revolute Primitive (Rz) > Sensing, select Upper-Limit Torque.
fc — Constraint force
physical signal
Physical signal port that outputs the constraint forces that act across the joint. The force maintains the translational constraints of the joint. For more information, see Measure Joint Constraint Forces.
Dependencies
To enable this port, under Composite Force/Torque Sensing, select Constraint Force.
tc — Constraint torque
physical signal
Physical signal port that outputs the constraint torques that act across the joint. The torque maintains the rotational constraints of the joint. For more information, see Force and Torque Sensing.
Dependencies
To enable this port, under Composite Force/Torque Sensing, select Constraint Torque.
ft — Total force
physical signal
Physical signal port that outputs the total force that acts across the joint. The total force is the sum of the forces transmitted from one frame to the other through the joint. The force includes the actuation, internal, limit, and constraint forces. See Force and Torque Sensing for more information.
Dependencies
To enable this port, under Composite Force/Torque Sensing, select Total Force.
tt — Total torque
physical signal
Physical signal port that outputs the total torque that acts across the joint. The total torque is the sum of the torques transmitted from one frame to the other through the joint. The torque includes the actuation, internal, limit, and constraint torques. For more information, see Force and Torque Sensing.
Dependencies
To enable this port, under Composite Force/Torque Sensing, select Total Torque.
Parameters
X Prismatic Primitive (Px)
State TargetsSpecify Position Target — Whether to specify position target
off (default) | on
Select this parameter to specify the position target for the x prismatic primitive.
Priority — Priority level of position target
High (desired) (default) | Low (approximate)
Priority level of the position target, specified as High
(desired) or Low (approximate). For
more information, see Guiding Assembly.
Dependencies
To enable this parameter, select Specify Position Target.
Value — Position target
0 m (default) | scalar
Position target of the x prismatic primitive, specified as a scalar in units of length.
Dependencies
To enable this parameter, select Specify Position Target.
Specify Velocity Target — Whether to specify linear velocity target
off (default) | on
Select this parameter to specify the linear velocity target for the x prismatic primitive.
Priority — Priority level of linear velocity target
High (desired) (default) | Low (approximate)
Priority level of the linear velocity target, specified as High
(desired) or Low (approximate). For
more information, see Guiding Assembly.
Dependencies
To enable this parameter, select Specify Velocity Target.
Value — Velocity target
0 m/s (default) | scalar
Linear velocity target for the x prismatic primitive, specified as a scalar.
Dependencies
To enable this parameter, select Specify Velocity Target.
Equilibrium Position — Position where internal force is zero
0 m (default) | scalar
Position where the spring force is zero, specified as a scalar in units of length.
Spring Stiffness — Stiffness of force law
0 N/m (default) | scalar
Stiffness of the internal spring-damper force law for the joint primitive, specified as a scalar in units of linear stiffness.
Damping Coefficient — Damping coefficient of force law
0 N(m/s) (default) | scalar
Damping coefficient of the internal spring-damper force law for the joint primitive, specified as a scalar in units of linear damping coefficient.
Specify Lower Limit — Whether to specify lower position limit
off (default) | on
Select this parameter to specify the lower limit of the x prismatic primitive.
Bound — Lower bound of free region
-1 m (default) | scalar
Lower bound of the free region of the x prismatic primitive, specified as a scalar in units of length.
Dependencies
To enable this parameter, select Specify Lower Limit.
Spring Stiffness — Stiffness of spring at lower bound
1e6 N/m (default) | scalar
Stiffness of the spring at the lower bound, specified as a scalar in units of linear stiffness.
Dependencies
To enable this parameter, select Specify Lower Limit.
Damping Coefficient — Damping coefficient at lower bound
1e3 N/(m/s) (default) | scalar
Damping coefficient at the lower bound, specified as a scalar in units of linear damping coefficient.
Dependencies
To enable this parameter, select Specify Lower Limit.
Transition Region Width — Region to smooth spring and damper forces
1e-4 m (default) | scalar
Region to smooth the spring and damper forces, specified as a scalar in units of length.
The block applies the full value of the lower-limit force when the penetration reaches the width of the transition region. The smaller the region, the sharper the onset of forces and the smaller the time step required of the solver. In the tradeoff between simulation accuracy and simulation speed, reducing the transition region improves accuracy and expanding it improves speed.
Dependencies
To enable this parameter, select Specify Lower Limit.
Specify Upper Limit — Whether to specify upper position limit
off (default) | on
Select this parameter to specify the upper limit of the x prismatic primitive.
Bound — Upper bound of free region
1 m (default) | scalar
Upper bound for the free region of the joint primitive, specified as a scalar in units of length.
Dependencies
To enable this parameter, select Specify Upper Limit.
Spring Stiffness — Stiffness of spring at upper bound
1e6 N/m (default) | scalar
Stiffness of the spring at the upper bound, specified as a scalar in units of linear stiffness.
Dependencies
To enable this parameter, select Specify Upper Limit.
Damping Coefficient — Damping coefficient at upper bound
1e3 N/(m/s) (default) | scalar
Damping coefficient at the upper bound, specified as a scalar in units of linear damping coefficient.
Dependencies
To enable this parameter, select Specify Upper Limit.
Transition Region Width — Region to smooth spring and damper forces
1e-4 m (default) | scalar
Region to smooth the spring and damper forces, specified as a scalar in units of length.
The block applies the full value of the upper-limit force when the penetration reaches the width of the transition region. The smaller the region, the sharper the onset of forces and the smaller the time step required of the solver. In the tradeoff between simulation accuracy and simulation speed, reducing the transition region improves accuracy and expanding it improves speed.
Dependencies
To enable this parameter, select Specify Upper Limit.
Force — Option to provide actuator force
None (default) | Provided by Input | Automatically Computed
Option to provide the actuator force for the joint primitive, specified as one of these values:
| Actuation Force Setting | Description |
|---|---|
None | No actuator force. |
Provided by Input | The input port fx specifies the actuator force for the x prismatic primitive. |
Automatically Computed | The block automatically calculates the amount of force
required to satisfy the motion inputs to the mechanism. If you
set this parameter to Automatically
Computed, you do not need to set
Motion to Provided by
Input for the same joint primitive. The
automatically computed force may satisfy a motion input
elsewhere in the mechanism. |
Motion — Option to provide motion
Automatically Computed (default) | Provided by Input
Option to provide the motion for the joint primitive, specified as one of these values:
| Actuation Motion Setting | Description |
|---|---|
Automatically Computed | The block computes and applies the joint primitive motion based on the model dynamics. |
Provided by Input | The nput port px specifies the motion for the joint primitive. |
Y Prismatic Primitive (Py)
State TargetsSpecify Position Target — Whether to specify position target
off (default) | on
Select this parameter to specify the position target for the y prismatic primitive.
Priority — Priority level of position target
High (desired) (default) | Low (approximate)
Priority level of the position target, specified as High
(desired) or Low (approximate). For
more information, see Guiding Assembly.
Dependencies
To enable this parameter, select Specify Position Target.
Value — Position target
0 m (default) | scalar
Position target of the y prismatic primitive, specified as a scalar in units of length.
Dependencies
To enable this parameter, select Specify Position Target.
Specify Velocity Target — Whether to specify linear velocity target
off (default) | on
Select this parameter to specify the linear velocity target for the y prismatic primitive.
Priority — Priority level of linear velocity target
High (desired) (default) | Low (approximate)
Priority level of the linear velocity target, specified as High
(desired) or Low (approximate). For
more information, see Guiding Assembly.
Dependencies
To enable this parameter, select Specify Velocity Target.
Value — Velocity target
0 m/s (default) | scalar
Linear velocity target for the y prismatic primitive, specified as a scalar.
Dependencies
To enable this parameter, select Specify Velocity Target.
Equilibrium Position — Position where internal force is zero
0 m (default) | scalar
Position where the spring force is zero, specified as a scalar in units of length.
Spring Stiffness — Stiffness of force law
0 N/m (default) | scalar
Stiffness of the internal spring-damper force law for the joint primitive, specified as a scalar in units of linear stiffness.
Damping Coefficient — Damping coefficient of force law
0 N(m/s) (default) | scalar
Damping coefficient of the internal spring-damper force law for the joint primitive, specified as a scalar in units of linear damping coefficient.
Specify Lower Limit — Whether to specify lower position limit
off (default) | on
Select this parameter to specify the lower limit of the y prismatic primitive.
Bound — Lower bound of free region
-1 m (default) | scalar
Lower bound of the free region of the y prismatic primitive, specified as a scalar in units of length.
Dependencies
To enable this parameter, select Specify Lower Limit.
Spring Stiffness — Stiffness of spring at lower bound
1e6 N/m (default) | scalar
Stiffness of the spring at the lower bound, specified as a scalar in units of linear stiffness.
Dependencies
To enable this parameter, select Specify Lower Limit.
Damping Coefficient — Damping coefficient at lower bound
1e3 N/(m/s) (default) | scalar
Damping coefficient at the lower bound, specified as a scalar in units of linear damping coefficient.
Dependencies
To enable this parameter, select Specify Lower Limit.
Transition Region Width — Region to smooth spring and damper forces
1e-4 m (default) | scalar
Region to smooth the spring and damper forces, specified as a scalar in units of length.
The block applies the full value of the lower-limit force when the penetration reaches the width of the transition region. The smaller the region, the sharper the onset of forces and the smaller the time step required of the solver. In the tradeoff between simulation accuracy and simulation speed, reducing the transition region improves accuracy and expanding it improves speed.
Dependencies
To enable this parameter, select Specify Lower Limit.
Specify Upper Limit — Whether to specify upper position limit
off (default) | on
Select this parameter to specify the upper limit of the y prismatic primitive.
Bound — Upper bound of free region
1 m (default) | scalar
Upper bound for the free region of the joint primitive, specified as a scalar in units of length.
Dependencies
To enable this parameter, select Specify Upper Limit.
Spring Stiffness — Stiffness of spring at upper bound
1e6 N/m (default) | scalar
Stiffness of the spring at the upper bound, specified as a scalar in units of linear stiffness.
Dependencies
To enable this parameter, select Specify Upper Limit.
Damping Coefficient — Damping coefficient at upper bound
1e3 N/(m/s) (default) | scalar
Damping coefficient at the upper bound, specified as a scalar in units of linear damping coefficient.
Dependencies
To enable this parameter, select Specify Upper Limit.
Transition Region Width — Region to smooth spring and damper forces
1e-4 m (default) | scalar
Region to smooth the spring and damper forces, specified as a scalar in units of length.
The block applies the full value of the upper-limit force when the penetration reaches the width of the transition region. The smaller the region, the sharper the onset of forces and the smaller the time step required of the solver. In the tradeoff between simulation accuracy and simulation speed, reducing the transition region improves accuracy and expanding it improves speed.
Dependencies
To enable this parameter, select Specify Upper Limit.
Force — Option to provide actuator force
None (default) | Provided by Input | Automatically Computed
Option to provide the actuator force for the joint primitive, specified as one of these values:
| Actuation Force Setting | Description |
|---|---|
None | No actuator force. |
Provided by Input | The input port fy specifies the actuator force for the y prismatic primitive. |
Automatically Computed | The block automatically calculates the amount of force
required to satisfy the motion inputs to the mechanism. If you
set this parameter to Automatically
Computed, you do not need to set
Motion to Provided by
Input for the same joint primitive. The
automatically computed force may satisfy a motion input
elsewhere in the mechanism. |
Motion — Option to provide motion
Automatically Computed (default) | Provided by Input
Option to provide the motion for the joint primitive, specified as one of these values:
| Actuation Motion Setting | Description |
|---|---|
Automatically Computed | The block computes and applies the joint primitive motion based on the model dynamics. |
Provided by Input | The input port py specifies the motion for the joint primitive. |
Z Revolute Primitive (Rz)
State TargetsSpecify Position Target — Whether to specify position target
off (default) | on
Select this parameter to specify the position target of the z revolute primitive.
Priority — Priority level of position target
High (desired) (default) | Low (approximate)
Priority level of the position target, specified as High
(desired) or Low (approximate). For
more information, see Guiding Assembly.
Dependencies
To enable this parameter, select Specify Position Target.
Value — Position target
0 deg (default) | scalar
Position target of the z revolute primitive, specified as a scalar with a unit of angle.
Dependencies
To enable this parameter, select Specify Position Target.
Specify Velocity Target — Whether to specify angular velocity target
off (default) | on
Select this parameter to specify the angular velocity target for the z revolute primitive.
Priority — Priority level of velocity target
High (desired) (default) | Low (approximate)
Priority level of the angular velocity target, specified as High
(desired) or Low (approximate). For
more information, see Guiding Assembly.
Dependencies
To enable this parameter, select Specify Velocity Target.
Value — Velocity target
0 deg/s (default) | scalar
Angular velocity target of the z revolute primitive, specified as a scalar with a unit of angular velocity.
Dependencies
To enable this parameter, select Specify Velocity Target.
Equilibrium Position — Position where internal torque is zero
0 deg (default) | scalar
Position where the spring torque is zero, specified as a scalar with a unit of angle.
Spring Stiffness — Stiffness of force law
0 N*m/deg (default) | scalar
Stiffness of the internal spring-damper force law for the z revolute primitive, specified as a scalar with a unit of torsional stiffness.
Damping Coefficient — Damping coefficient of force law
0 N*m/(deg/s) (default) | scalar
Damping coefficient of the internal spring-damper force law for the z revolute primitive, specified as a scalar with a unit of damping coefficient.
Specify Lower Limit — Whether to specify lower position limit
off (default) | on
Select this parameter to specify the lower limit of the z revolute primitive.
Bound — Lower bound of free region
-90 deg (default) | scalar
Lower bound for the free region of the z revolute primitive, specified as a scalar with a unit of angle.
Dependencies
To enable this parameter, select Specify Lower Limit.
Spring Stiffness — Stiffness of spring at lower bound
1e4 N*m/deg (default) | scalar
Stiffness of the spring at the lower bound, specified as a scalar with a unit of torsional stiffness.
Dependencies
To enable this parameter, select Specify Lower Limit.
Damping Coefficient — Damping coefficient at lower bound
10 N*m/(deg/s) (default) | scalar
Damping coefficient at the lower bound, specified as a scalar with a unit of damping coefficient.
Dependencies
To enable this parameter, select Specify Lower Limit.
Transition Region Width — Region to smooth spring and damper torques
0.1 deg (default) | scalar
Region to smooth the spring and damper torques, specified as a scalar with a unit of angle.
The block applies the full value of the lower-limit torque when the penetration reaches the width of the transition region. The smaller the region, the sharper the onset of forces and the smaller the time-step required of the solver. In the tradeoff between simulation accuracy and simulation speed, reducing the transition region improves accuracy and increasing it improves speed.
Dependencies
To enable this parameter, select Specify Lower Limit.
Specify Upper Limit — Whether to specify upper position limit
off (default) | on
Select this parameter to specify the upper limit of the z revolute primitive.
Bound — Upper bound of free region
90 deg (default) | scalar
Upper bound for the free region of the z revolute primitive, specified as a scalar with a unit of angle.
Dependencies
To enable this parameter, select Specify Upper Limit.
Spring Stiffness — Stiffness of spring at upper bound
1e4 N*m/deg (default) | scalar
Stiffness of the spring at the upper bound, specified as a scalar with a unit of torsional stiffness.
Dependencies
To enable this parameter, select Specify Upper Limit.
Damping Coefficient — Damping coefficient at upper bound
10 N*m/(deg/s) (default) | scalar
Damping coefficient at the upper bound, specified as a scalar with a unit of damping coefficient.
Dependencies
To enable this parameter, select Specify Upper Limit.
Transition Region Width — Region to smooth spring and damper torques
0.1 deg (default) | scalar
Region to smooth the spring and damper torques, specified as a scalar with a unit of angle.
The block applies the full value of the upper-limit torque when the penetration reaches the width of the transition region. The smaller the region, the sharper the onset of forces and the smaller the time-step required of the solver. In the tradeoff between simulation accuracy and simulation speed, reducing the transition region improves accuracy and increasing it improves speed.
Dependencies
To enable this parameter, select Specify Upper Limit.
Torque — Option to provide actuator torque
None (default) | Provided by Input | Automatically Computed
Option to provide the actuator torque for the joint primitive, specified as one of these values:
| Actuation Torque Setting | Description |
|---|---|
None | No actuator torque. |
Provided by Input | The input port tz specifies the actuator torque for the z revolute primitive. |
Automatically Computed | The block computes the torque automatically. If you set this
parameter to Automatically Computed,
you do not need to set Motion to
Provided by Input for the for
the same joint primitive. The automatically computed torque may
satisfy a motion input somewhere else in the mechanism. |
Motion — Option to provide motion
Automatically Computed (default) | Provided by Input
Option to provide the motion for the joint primitive, specified as one of these values:
| Actuation Torque Setting | Description |
|---|---|
Automatically computed | The block computes and applies the joint primitive motion based on model dynamics. |
Provided by Input | The input port qz specifies the motion for the z revolute primitive. |
Mode Configuration
Mode — Joint mode
Normal (default) | Locked | Disengaged | Provided by Input
Joint mode for the simulation, specified as one of these values:
| Method | Description |
|---|---|
Locked | The locked mode constrains the degrees of freedom (DOFs) of the joint. The locked joint retains its initial position in the assembly and has zero velocity throughout the simulation. The introduced constraints contribute to the constraint force and torque in the joint. |
Normal | The normal mode enables the DOFs and constraints of the joint work normally throughout the simulation. |
Disengaged | The disengaged mode frees all the constraints of the joint throughout the simulation. |
Provided by Input | The Provided by Input option exposes the port
mode. You can control the joint modes
by using input signals. |
Composite Force/Torque Sensing
Direction — Measurement direction
Follower on Base (default) | Base on Follower
Measurement direction, specified as one of these values:
Follower on Base— The block senses the force and torque that the follower frame exerts on the base frame.Base on Follower— The block senses the force and torque that the base frame exerts on the follower frame.
This parameter only affects the output signals under the Composite Force/Torque Sensing section. Reversing the direction changes the sign of the measurements. For more information see Force and Torque Measurement Direction.
Resolution Frame — Frame used to resolve measurements
Base (default) | Follower
Frame used to resolve the measurements, specified as one of these values:
Base— The block resolves the measurements in the coordinates of the base frame.Follower— The block resolves the measurements in the coordinates of the follower frame.
This parameter only affects the output signals under the Composite Force/Torque Sensing section.
Constraint Force — Whether to sense constraint force in joint
off (default) | on
Select this parameter to enable the port fc.
Constraint Torque — Whether to sense constraint torque in joint
off (default) | on
Select this parameter to enable the port tc.
Total Force — Whether to sense total force in joint
off (default) | on
Select this parameter to enable the port ft.
Total Torque — Whether to sense total torque in joint
off (default) | on
Select this parameter to enable the port tt.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2012a
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list:
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)