Point on Curve Constraint
Kinematic constraint between frame origin and curved path

Libraries:
Simscape /
Multibody /
Constraints
Description
The Point on Curve Constraint block confines a point to a curve. The frame attached to the point is free to rotate depending on other constraints in the model. Use the Point on Curve Constraint block to model point-on-curve constraints, such as that between a roller coaster and a track or a cam follower and a cam.
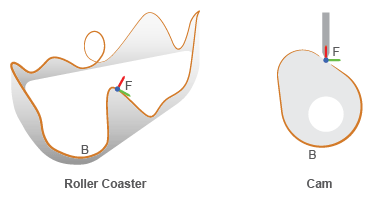
The Point on Curve Constraint block has two ports: F and B. Port F is a frame port whose origin corresponds to the point. Port B is a geometry port that you connect to a curve. Avoid curves with sharp changes in slope, as these can cause simulation issues.
You can use this block to sense the constraint forces and torques between the point and curve. Based on the setting of the Resolution Frame parameter, the block resolves the forces and torques in either the base or follower frame.

Ports
Geometry
Frame
Output
Parameters
Extended Capabilities
Version History
Introduced in R2015b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)