Discrete PI Controller
Discrete-time PI controller with external anti-windup input

Libraries:
Simscape /
Electrical /
Control /
General Control
Description
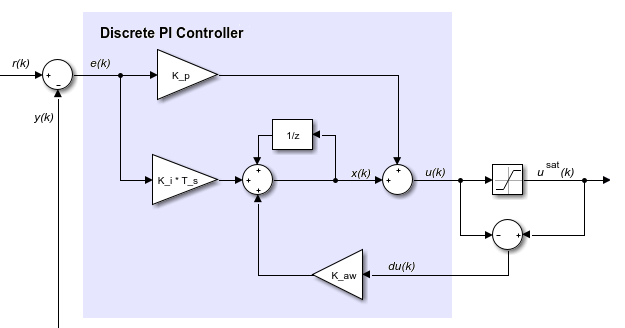
The Discrete PI Controller block implements discrete PI control with external anti-windup input.
This diagram is the equivalent circuit for the controller with external anti-windup input.
Equations
The Discrete PI Controller block calculates the control signal using the backward Euler discretization method:
where
u is the control signal.
Kp is the proportional gain coefficient.
Ki is the integral gain coefficient.
Kaw is the anti-windup gain coefficient.
Ts is the sampling period.
e is the error signal.
To prevent excessive overshoot, the block can use back calculation to implement an external anti-windup mechanism. It inputs du(k), the difference between the saturated control signal, usat(k), and the calculated unsaturated control signal, u(k). It then multiplies the difference by the anti-windup coefficient and adds the amplified signal from the integral gain.



Ports
Input
Output
Parameters
References
[1] Åström, K. and T. Hägglund. Advanced PID Control. Research Triangle Park, NC: ISA, 2005.
Extended Capabilities
Version History
Introduced in R2017b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)