Mu Synthesis
The technique of μ synthesis
extends the methods of H∞
synthesis to design a robust controller for a SISO or MIMO uncertain
plant. You can perform μ synthesis on plants with
parameter uncertainty, dynamic uncertainty, or both using the musyn command.
musyn uses an iterative process called
D-K iteration to optimize the robust
H∞ performance of the
system. To get started with μ synthesis, see Robust Controller Design Using Mu Synthesis.
Functions
musyn | Robust controller design using mu synthesis (Since R2019b) |
musynOptions | Options for musyn (Since R2019b) |
musynperf | Robust H∞ performance optimized
by musyn (Since R2019b) |
cmsclsyn | Approximately solve constant-matrix, upper bound µ-synthesis problem |
Topics
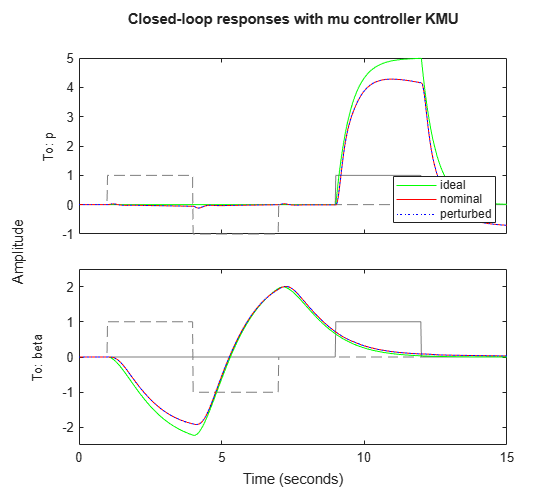
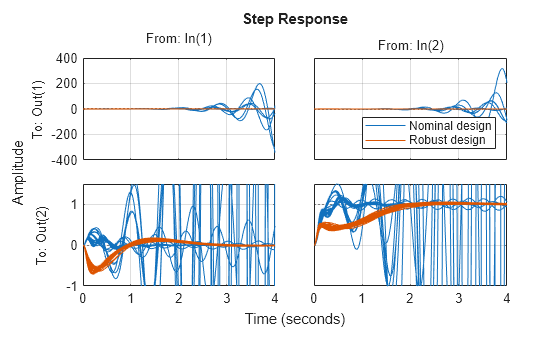
- Robust Controller Design Using Mu Synthesis
Use μ synthesis to design an unstructured robust controller or a fixed-structure robust controller for an uncertain plant.
- Improve Results of Mu Synthesis
You can sometimes improve the results of controller synthesis with
musynby changing certain computation options. - Robust Performance Measure for Mu Synthesis
The measure of robust performance calculated by
musynperfand optimized bymusynis the μ upper bound. - D-K Iteration Process
The
musyncommand synthesizes robust controllers using an algorithm that includes iterating between optimizing robust performance (the D step) and computing an H∞ controller (the K step).
Related Information
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)