Robustness and Worst-Case Analysis
A robust control system meets stability and performance requirements for all possible values of uncertain parameters. Although Monte-Carlo parameter sampling can yield a general idea of system performance across all uncertainty ranges, it cannot produce a guaranteed analysis of the worst-case parameter combination. The robustness analysis commands in this category directly calculate the upper and lower bounds on worst-case performance without random sampling. You can also calculate robustness margins that tell you how much variation in uncertain parameters the system can tolerate while maintaining stability or desired performance.
Functions
Topics
Robustness Analysis
- Robustness and Worst-Case Analysis
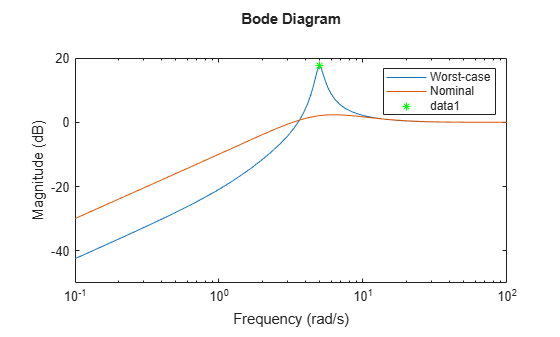
Understand the relationships among measures of robust stability, robust performance, and worst-case gain. - Robust Stability and Worst-Case Gain of Uncertain System
Calculate the robust stability and examine the worst-case gain of a closed-loop uncertain system. - Worst-Case Sensitivity Functions of Feedback Loops
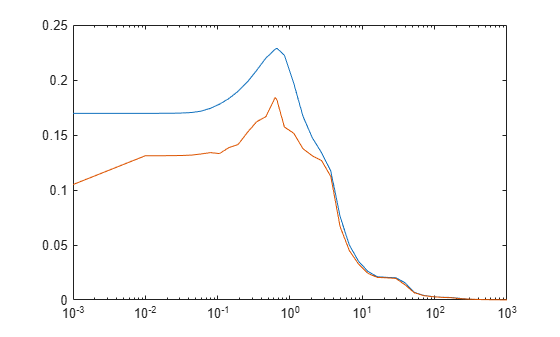
Usewcgainto compute the worst-case sensitivity and complementary sensitivity functions of feedback control structures. - Robust Stability, Robust Performance and Mu Analysis
Analyze and quantify the robustness of feedback control systems with uncertainty, and understand the relationship between robustness and the structured singular value, μ. - MIMO Robustness Analysis
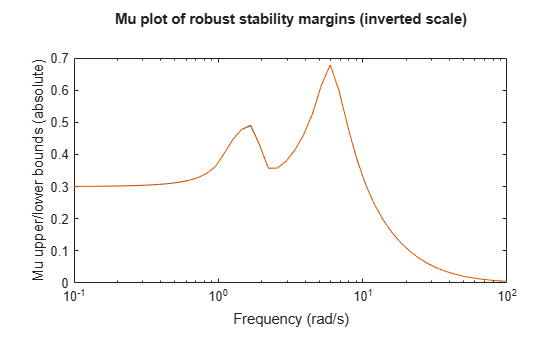
Create a MIMO system with parametric uncertainty and analyze it for robust stability and worst-case performance. - Getting Reliable Estimates of Robustness Margins
Systems with only real uncertain parameters can have discontinuities in the structured singular value μ that hide robustness issues.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)