Practical Introduction to Digital Filter Design
This example shows how to design FIR and IIR filters based on frequency response specifications using the designfilt function in the Signal Processing Toolbox® product. The example concentrates on lowpass filters but most of the results apply to other response types as well.
This example focuses on the design of digital filters rather than on their applications. If you want to learn more about digital filter applications, see Practical Introduction to Digital Filtering.
FIR Filter Design
Lowpass Filter Specifications
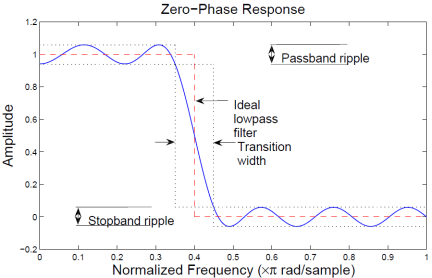
The ideal lowpass filter is one that leaves unchanged all frequency components of a signal below a designated cutoff frequency, , and rejects all components above . Because the impulse response required to implement the ideal lowpass filter is infinitely long, it is impossible to design an ideal FIR lowpass filter. Finite length approximations to the ideal impulse response lead to the presence of ripples in both the passband () and the stopband () of the filter, as well as to a nonzero transition width between passband and stopband.
Both the passband/stopband ripples and the transition width are undesirable but unavoidable deviations from the response of an ideal lowpass filter when approximated with a finite impulse response. These deviations are depicted in the following figure:
Practical FIR designs typically consist of filters that have a transition width and maximum passband and stopband ripples that do not exceed allowable values. In addition to those design specifications, one must select the filter order, or, equivalently, the length of the truncated impulse response.
A useful metaphor for the design specifications in filter design is to think of each specification as one of the angles in the triangle shown in the figure below.
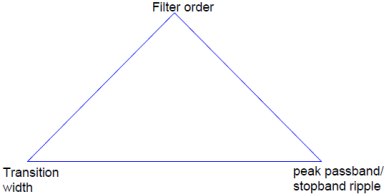
The triangle is used to understand the degrees of freedom available when choosing design specifications. Because the sum of the angles is fixed, one can at most select the values of two of the specifications. The third specification will be determined by the particular design algorithm. Moreover, as with the angles in a triangle, if we make one of the specifications larger/smaller, it will impact one or both of the other specifications.
FIR filters are very attractive because they are inherently stable and can be designed to have linear phase. Nonetheless, these filters can have long transient responses and might prove computationally expensive in certain applications.
Minimum-Order FIR Designs
Minimum-order designs are obtained by specifying passband and stopband frequencies as well as a passband ripple and a stopband attenuation. The design algorithm then chooses the minimum filter length that complies with the specifications.
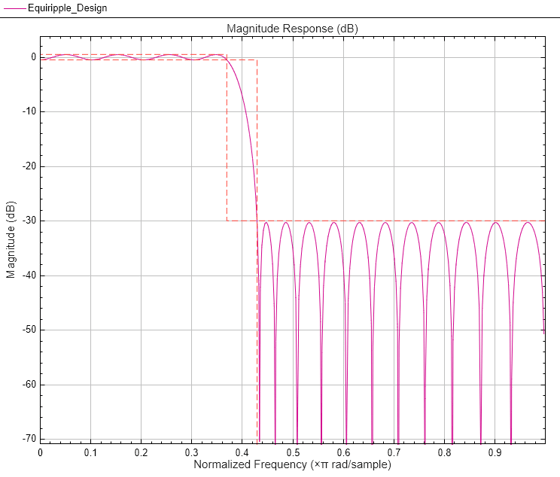
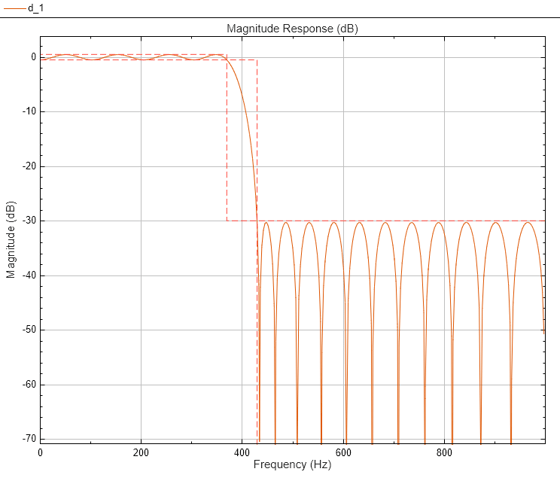
Design a minimum-order lowpass FIR filter with a passband frequency of 0.37*pi rad/sample, a stopband frequency of 0.43*pi rad/sample (hence the transition width equals 0.06*pi rad/sample), a passband ripple of 1 dB and a stopband attenuation of 30 dB.
Fpass = 0.37; Fstop = 0.43; Ap = 1; Ast = 30; d = designfilt("lowpassfir", ... PassbandFrequency=Fpass, ... StopbandFrequency=Fstop, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast); fa = filterAnalyzer(d,FilterNames="Equiripple_Design");
The resulting filter order can be queried using the filtord function.
N = filtord(d)
N = 39
You can use the info function to get information about the parameters used to design the filter.
info(d)
ans = 25x32 char array
'FIR Digital Filter (real) '
'------------------------- '
'Filter Length : 40 '
'Stable : Yes '
'Linear Phase : Yes (Type 2) '
' '
'Design Method Information '
'Design Algorithm : Equiripple '
' '
'Design Options '
'Density Factor : 16 '
'Maximum Phase : false '
'Minimum Order : any '
'Minimum Phase : false '
'Stopband Decay : 0 '
'Stopband Shape : flat '
'Uniform Grid : true '
' '
'Design Specifications '
'Sample Rate : 2 (normalized)'
'Response : Lowpass '
'Passband Ripple : 1 dB '
'Stopband Atten. : 30 dB '
'Passband Edge : 0.37 '
'Stopband Edge : 0.43 '
The
designfiltfunction chooses an equiripple design algorithm by default. Linear-phase equiripple filters are desirable because for a given order they have the smallest possible maximum deviation from the ideal filter.
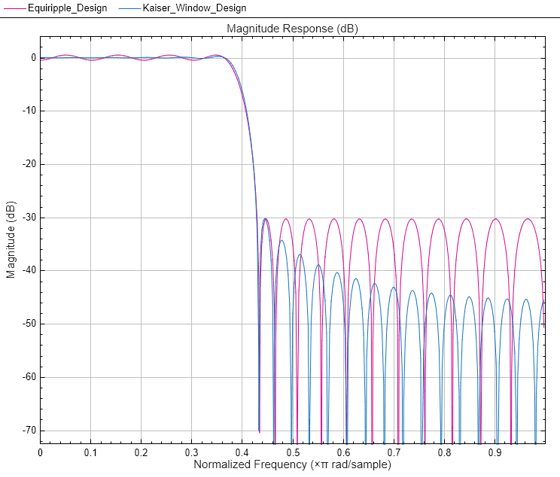
Note, however, that minimum-order designs can also be obtained using a Kaiser window. Even though the Kaiser window method yields a larger filter order for the same specifications, the algorithm is less computationally expensive and less likely to have convergence issues when the design specifications are very stringent. This may occur if the application requires a very narrow transition width or a very large stopband attenuation.
Design a filter with the same specifications as above using the Kaiser window method and compare its response to the equiripple filter.
dk = designfilt("lowpassfir", ... PassbandFrequency=Fpass, ... StopbandFrequency=Fstop, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast, ... DesignMethod="kaiserwin"); addFilters(fa,dk,FilterNames="Kaiser_Window_Design");
N = filtord(dk)
N = 52
Specifying Frequency Parameters in Hertz
If you know the sample rate at which the filter will operate, you can specify the sample rate and the frequencies in hertz. Redesign the minimum-order equiripple filter for a sample rate of 2 kHz.
Fpass = 370; Fstop = 430; Ap = 1; Ast = 30; Fs = 2000; d = designfilt("lowpassfir", ... PassbandFrequency=Fpass, ... StopbandFrequency=Fstop, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast, ... SampleRate=Fs); filterAnalyzer(d)
Fixed Order, Fixed Transition Width
Fixed-order designs are useful for applications that are sensitive to computational load or impose a limit on the number of filter coefficients. An option is to fix the transition width at the expense of control over the passband ripple/stopband attenuation.
Consider a 30th-order lowpass FIR filter with a passband frequency of 370 Hz, a stopband frequency of 430 Hz, and a sample rate of 2 kHz. There are two design methods available for this particular set of specifications: equiripple and least squares. Let us design one filter for each method and compare the results.
N = 30; Fpass = 370; Fstop = 430; Fs = 2000; % Design method defaults to "equiripple" when omitted deq = designfilt("lowpassfir", ... FilterOrder=N, ... PassbandFrequency=Fpass, ... StopbandFrequency=Fstop, ... SampleRate=Fs); dls = designfilt("lowpassfir", ... FilterOrder=N, ... PassbandFrequency=Fpass, ... StopbandFrequency=Fstop, ... DesignMethod="ls", ... SampleRate=Fs); filterAnalyzer(deq,dls,FilterNames=["Equiripple_Design_2" "Least_Squares_Design_2"])
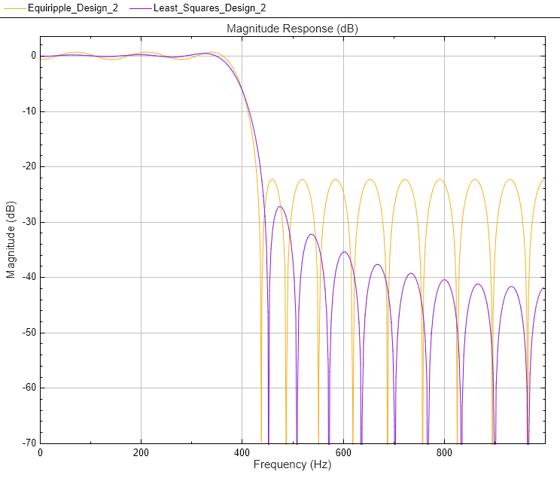
Equiripple filters are ideally suited for applications in which a specific tolerance must be met, such as designing a filter with a given minimum stopband attenuation or a given maximum passband ripple. On the other hand, these designs may not be desirable if we want to minimize the energy of the error (between ideal and actual filter) in the passband/stopband.
If you want to reduce the energy of a signal as much as possible in a certain frequency band, use a least-squares design.
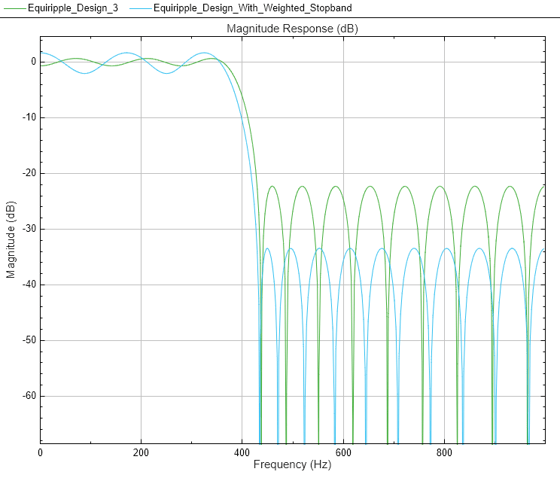
In the examples above, the designed filters had the same ripple in the passband and in the stopband. We can use weights to reduce the ripple in one of the bands while keeping the filter order fixed. For example, if you wish the stopband ripple to be a tenth of that in the passband, you must give the stopband ten times the passband weight. Redesign the equiripple filter using that fact.
deqw = designfilt("lowpassfir", ... FilterOrder=N, ... PassbandFrequency=Fpass, ... StopbandFrequency=Fstop, ... PassbandWeight=1, ... StopbandWeight=10, ... SampleRate=Fs); filterAnalyzer(deq,deqw,FilterNames=["Equiripple_Design_3" "Equiripple_Design_With_Weighted_Stopband"])
Fixed Order, Fixed Cutoff Frequency
You can design filters with fixed filter order and cutoff frequency using a window design method.
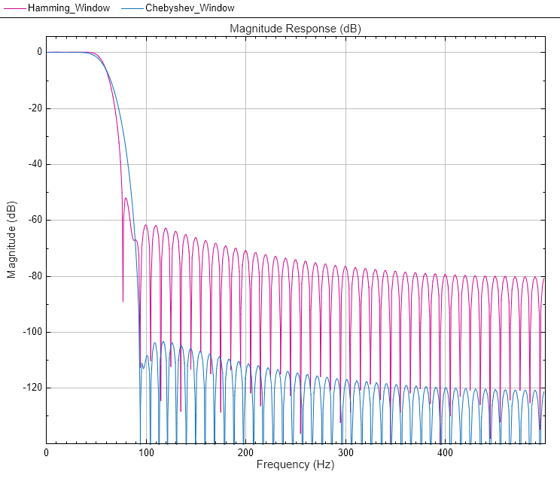
You can use different windows to control the stopband attenuation while keeping the filter order unchanged.
For example, consider a 100-th order lowpass FIR filter with a cutoff frequency of 60 Hz and a sample rate of 1 kHz. Compare designs that result from using a Hamming window, and a Chebyshev window with 90 dB of sidelobe attenuation.
dhamming = designfilt("lowpassfir", ... FilterOrder=100, ... CutoffFrequency=60, ... SampleRate=1000, ... Window="hamming"); dchebwin = designfilt("lowpassfir", ... FilterOrder=100, ... CutoffFrequency=60, ... SampleRate=1000, ... Window={"chebwin",90}); filterAnalyzer(dhamming,dchebwin,FilterNames=["Hamming_Window" "Chebyshev_Window"])
There are other ways in which you can specify a filter with fixed order: fixed cutoff frequency, passband ripple, and stopband attenuation; fixed transition width; and fixed half-power (3dB) frequency.
IIR Filter Design
One of the drawbacks of FIR filters is that they require a large filter order to meet some design specifications. If the ripples are kept constant, the filter order grows inversely proportional to the transition width. By using feedback, it is possible to meet a set of design specifications with a far smaller filter order. This is the idea behind IIR filter design. The term "infinite impulse response" (IIR) stems from the fact that, when an impulse is applied to the filter, the output never decays to zero.
IIR filters are useful when computational resources are at a premium. However, stable, causal IIR filters cannot have perfectly linear phase. Avoid IIR designs in cases where phase linearity is a requirement.
Another important reason for using IIR filters is their small group delay relative to FIR filters, which results in a shorter transient response.
Butterworth Filters
Butterworth filters are maximally flat IIR filters. The flatness in the passband and stopband causes the transition band to be very wide. Large orders are required to obtain filters with narrow transition widths.
Design a minimum-order Butterworth filter with passband frequency 100 Hz, stopband frequency 300 Hz, maximum passband ripple 1 dB, and 60 dB stopband attenuation. The sample rate is 2 kHz.
Fp = 100; Fst = 300; Ap = 1; Ast = 60; Fs = 2e3; dbutter = designfilt("lowpassiir", ... PassbandFrequency=Fp, ... StopbandFrequency=Fst, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast, ... SampleRate=Fs, ... DesignMethod="butter");
Chebyshev Type I Filters
Chebyshev Type I filters attain smaller transition widths than Butterworth filters of the same order by allowing for passband ripple.
Butterworth and Chebyshev Type I filters both have maximally flat stopbands. For a given filter order, the tradeoff is between passband ripple and transition width.
Design a Chebyshev Type I filter with the same specifications as the Butterworth filter above.
dcheby1 = designfilt("lowpassiir", ... PassbandFrequency=Fp, ... StopbandFrequency=Fst, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast, ... SampleRate=Fs, ... DesignMethod="cheby1");
Chebyshev Type II Filters
Chebyshev Type II filters have maximally flat passbands and equiripple stopbands.
Since extremely large attenuations are typically not required, we may be able to attain the required transition width with a relatively small order by allowing for some stopband ripple.
Design a minimum-order Chebyshev Type II filter with the same specifications as in the previous examples.
dcheby2 = designfilt("lowpassiir", ... PassbandFrequency=Fp, ... StopbandFrequency=Fst, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast, ... DesignMethod="cheby2", ... SampleRate=Fs);
Elliptic Filters
Elliptic filters generalize Chebyshev and Butterworth filters by allowing for ripple in both the passband and the stopband. As ripples are made smaller, elliptic filters can approximate arbitrarily close the magnitude and phase response of either Chebyshev or Butterworth filters.
Elliptic filters attain a given transition width with the smallest order.
dellip = designfilt("lowpassiir", ... PassbandFrequency=Fp, ... StopbandFrequency=Fst, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast, ... DesignMethod="ellip", ... SampleRate=Fs);
Compare the responses and the orders of the four IIR filters.
For the same specification constraints, the Butterworth method yields the highest order and the elliptic method yields the smallest.
FilterOrders = [filtord(dbutter) filtord(dcheby1) filtord(dcheby2) filtord(dellip)]
FilterOrders = 1×4
7 5 5 4
fa = filterAnalyzer(dbutter,dcheby1,dcheby2,dellip, ... FilterNames=["Butterworth","Chebyshev_Type_I" "Chebyshev_Type_II" "Elliptic"]);
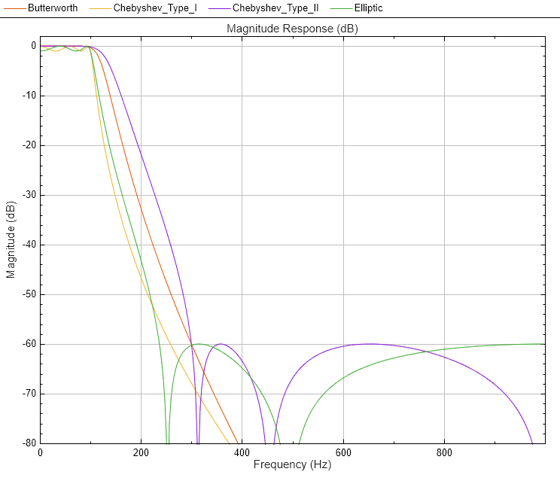
zoom(fa,"xy",[0 1e3 -80 2])Zoom into the passband to see the ripple differences.
zoom(fa,"xy",[0 150 -3 2])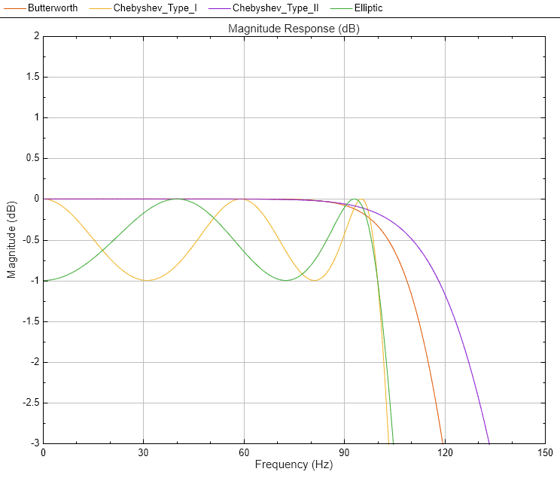
Matching Exactly the Passband or Stopband Specifications
With minimum-order designs, the ideal order needs to be rounded to the next integer. This additional fractional order allows the algorithm to actually exceed the specifications.
Use the "
MatchExactly"parameter to constrain the design algorithm to match one band exactly. The other band exceeds its specification.
By default, Chebyshev Type I designs match the passband, Butterworth and Chebyshev Type II match the stopband, and elliptic designs match both the passband and the stopband (while the stopband edge frequency is exceeded):
dellip1 = designfilt("lowpassiir", ... PassbandFrequency=Fp, ... StopbandFrequency=Fst, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast, ... DesignMethod="ellip", ... SampleRate=Fs, ... MatchExactly="passband"); dellip2 = designfilt("lowpassiir", ... PassbandFrequency=Fp, ... StopbandFrequency=Fst, ... PassbandRipple=Ap, ... StopbandAttenuation=Ast, ... DesignMethod="ellip", ... SampleRate=Fs, ... MatchExactly="stopband"); fa = filterAnalyzer(dellip,dellip1,dellip2, ... FilterNames=["Matched_Passband_And_Stopband" ... "Matched_Passband" "Matched_Stopband"]); zoom(fa,"xy",[0 1e3 -80 2])
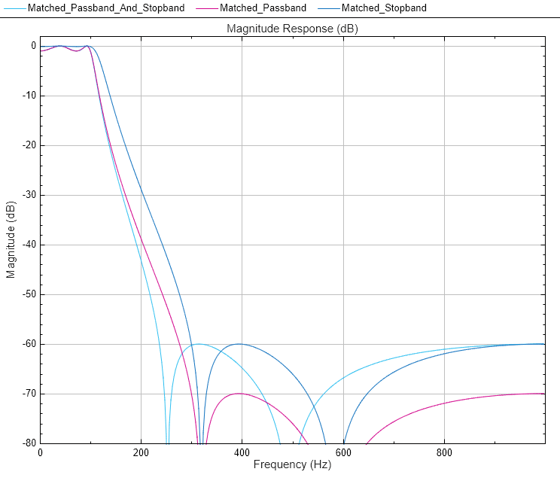
The matched-passband and matched-both designs have a ripple of exactly 1 dB at the passband frequency value of 100 Hz.
Group Delay Comparison
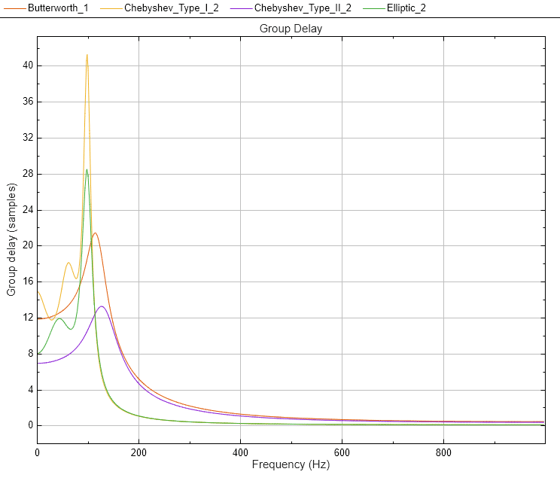
With IIR filters, we need to consider not only the ripple/transition width tradeoff, but also the degree of phase distortion. We know that it is impossible to have linear-phase throughout the entire Nyquist interval. Thus we may want to see how far from linear the phase response is. A good way to do this is to look at the (ideally constant) group delay and see how flat it is.
Compare the group delay of the four IIR filters designed above.
If phase is an issue, keep in mind that Butterworth and Chebyshev Type II designs have the flattest group delay and thus introduce the least distortion.
fa = filterAnalyzer(dbutter,dcheby1,dcheby2,dellip,Analysis="groupdelay", ... FilterNames=["Butterworth_1" "Chebyshev_Type_I_2" "Chebyshev_Type_II_2" "Elliptic_2"]);
Conclusions
In this example, you learned how to use designfilt to obtain a variety of lowpass FIR and IIR filters with different constraints and design methods. designfilt can also be used to obtain highpass, bandpass, bandstop, arbitrary-magnitude, differentiator, and Hilbert designs. To learn more about all available options, Filter Design Gallery.
Further Reading
For more information on filter design and analysis, see the Signal Processing Toolbox® software documentation. For more information on filter applications see Practical Introduction to Digital Filtering.
Copyright 2024 The MathWorks, Inc.
See Also
Apps
Functions
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)