aryule
Autoregressive all-pole model parameters — Yule-Walker method
Description
Examples
Parameter Estimation Using the Yule-Walker Method
Use a vector of polynomial coefficients to generate an AR(4) process by filtering 1024 samples of white noise. Reset the random number generator for reproducible results. Use the Yule-Walker method to estimate the coefficients.
rng default
A = [1 -2.7607 3.8106 -2.6535 0.9238];
y = filter(1,A,0.2*randn(1024,1));
arcoeffs = aryule(y,4)arcoeffs = 1×5
1.0000 -2.7262 3.7296 -2.5753 0.8927
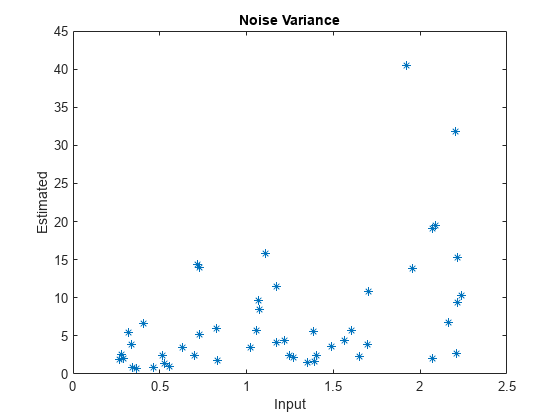
Generate 50 realizations of the process, changing each time the variance of the input noise. Compare the Yule-Walker-estimated variances to the actual values.
nrealiz = 50; noisestdz = rand(1,nrealiz)+0.5; randnoise = randn(1024,nrealiz); noisevar = zeros(1,nrealiz); for k = 1:nrealiz y = filter(1,A,noisestdz(k) * randnoise(:,k)); [arcoeffs,noisevar(k)] = aryule(y,4); end plot(noisestdz.^2,noisevar,'*') title('Noise Variance') xlabel('Input') ylabel('Estimated')
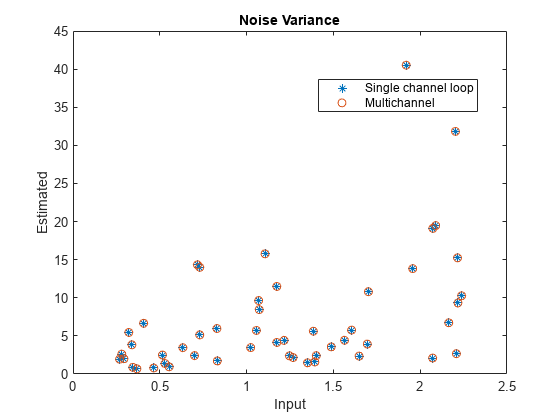
Repeat the procedure using the function's multichannel syntax.
Y = filter(1,A,noisestdz.*randnoise); [coeffs,variances] = aryule(Y,4); hold on plot(noisestdz.^2,variances,'o') hold off legend('Single channel loop','Multichannel','Location','best')
Estimate Model order Using Decay of Reflection Coefficients
Use a vector of polynomial coefficients to generate an AR(2) process by filtering 1024 samples of white noise. Reset the random number generator for reproducible results.
rng default
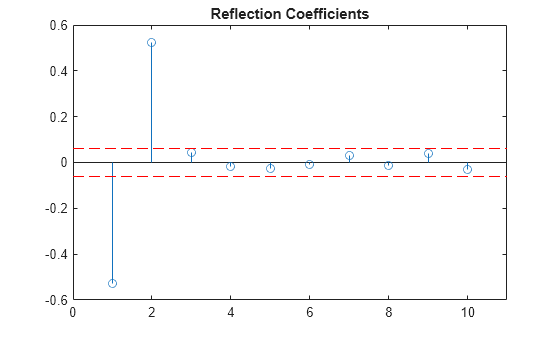
y = filter(1,[1 -0.75 0.5],0.2*randn(1024,1));Use the Yule-Walker method to fit an AR(10) model to the process. Output and plot the reflection coefficients. Only the first two coefficients lie outside the 95% confidence bounds, indicating that an AR(10) model significantly overestimates the time dependence in the data. See AR Order Selection with Partial Autocorrelation Sequence for more details.
[ar,nvar,rc] = aryule(y,10); stem(rc) xlim([0 11]) conf95 = sqrt(2)*erfinv(0.95)/sqrt(1024); [X,Y] = ndgrid(xlim,conf95*[-1 1]); hold on plot(X,Y,'--r') hold off title('Reflection Coefficients')
Input Arguments
Output Arguments
More About
Algorithms
aryule uses the Levinson-Durbin recursion on the biased estimate of the
sample autocorrelation sequence to compute the parameters.
References
[1] Hayes, Monson H. Statistical Digital Signal Processing and Modeling. New York: John Wiley & Sons, 1996.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)