besself
Bessel analog filter design
Description
[
returns the transfer function coefficients of an b,a] = besself(n,Wo)nth-order
lowpass analog Bessel filter, where Wo is the angular
frequency up to which the filter's group delay is approximately constant. Larger
values of n produce a group delay that better approximates
a constant up to Wo. The besself
function does not support the design of digital Bessel filters.
Examples
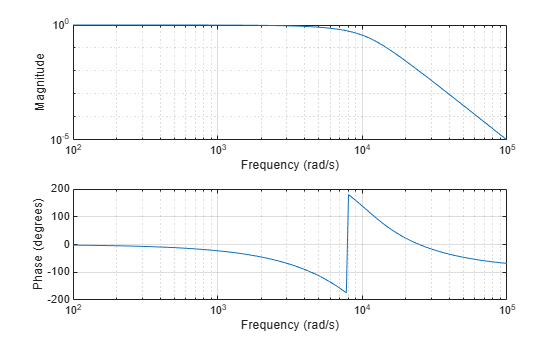
Frequency Response of Lowpass Bessel Filter
Design a fifth-order analog lowpass Bessel filter with approximately constant group delay up to rad/second. Plot the magnitude and phase responses of the filter using freqs.
wc = 10000; [b,a] = besself(5,wc); freqs(b,a)
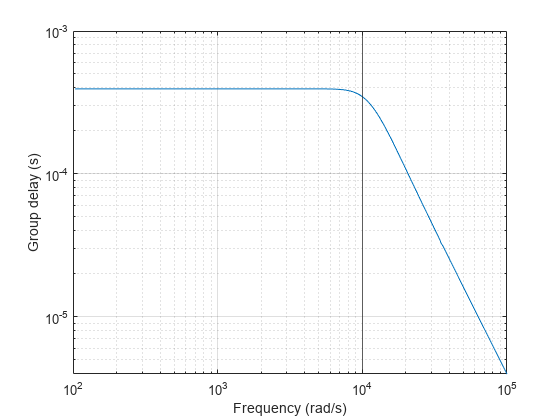
Compute the group delay response of the filter as the negative of the derivative of the unwrapped phase response. Plot the group delay to verify that it is approximately constant up to the cutoff frequency.
[h,w] = freqs(b,a); grpdel = -diff(unwrap(angle(h)))./diff(w); clf loglog(w(2:end),grpdel) xlabel('Frequency (rad/s)') ylabel('Group delay (s)') xline(wc) grid
Comparison of Analog IIR Lowpass Filters
Design a 5th-order analog Butterworth lowpass filter with a cutoff frequency of 2 GHz. Multiply by to convert the frequency to radians per second. Compute the frequency response of the filter at 4096 points.
n = 5;
fc = 2e9;
[zb,pb,kb] = butter(n,2*pi*fc,"s");
[bb,ab] = zp2tf(zb,pb,kb);
[hb,wb] = freqs(bb,ab,4096);Design a 5th-order Chebyshev Type I filter with the same edge frequency and 3 dB of passband ripple. Compute its frequency response.
[z1,p1,k1] = cheby1(n,3,2*pi*fc,"s");
[b1,a1] = zp2tf(z1,p1,k1);
[h1,w1] = freqs(b1,a1,4096);Design a 5th-order Chebyshev Type II filter with the same edge frequency and 30 dB of stopband attenuation. Compute its frequency response.
[z2,p2,k2] = cheby2(n,30,2*pi*fc,"s");
[b2,a2] = zp2tf(z2,p2,k2);
[h2,w2] = freqs(b2,a2,4096);Design a 5th-order elliptic filter with the same edge frequency, 3 dB of passband ripple, and 30 dB of stopband attenuation. Compute its frequency response.
[ze,pe,ke] = ellip(n,3,30,2*pi*fc,"s");
[be,ae] = zp2tf(ze,pe,ke);
[he,we] = freqs(be,ae,4096);Design a 5th-order Bessel filter with the same edge frequency. Compute its frequency response.
[zf,pf,kf] = besself(n,2*pi*fc); [bf,af] = zp2tf(zf,pf,kf); [hf,wf] = freqs(bf,af,4096);
Plot the attenuation in decibels. Express the frequency in gigahertz. Compare the filters.
plot([wb w1 w2 we wf]/(2e9*pi), ... mag2db(abs([hb h1 h2 he hf]))) axis([0 5 -45 5]) grid xlabel("Frequency (GHz)") ylabel("Attenuation (dB)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"])
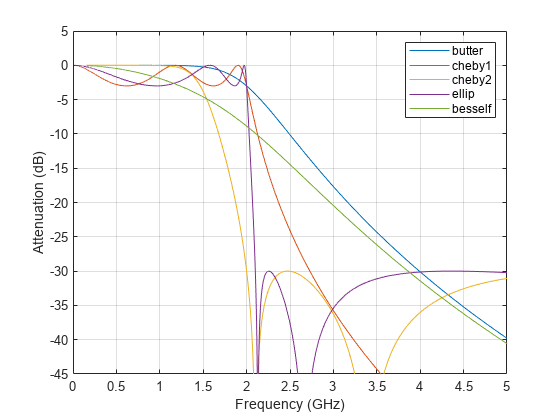
The Butterworth and Chebyshev Type II filters have flat passbands and wide transition bands. The Chebyshev Type I and elliptic filters roll off faster but have passband ripple. The frequency input to the Chebyshev Type II design function sets the beginning of the stopband rather than the end of the passband. The Bessel filter has approximately constant group delay along the passband.
Input Arguments
Output Arguments
Algorithms
besself designs analog Bessel filters, which are characterized by
an almost constant group delay across the entire passband, thus preserving the wave
shape of filtered signals in the passband.
Lowpass Bessel filters have a monotonically decreasing magnitude response, as do lowpass Butterworth filters. Compared to the Butterworth, Chebyshev, and elliptic filters, the Bessel filter has the slowest rolloff and requires the highest order to meet an attenuation specification.
For high-order filters, the state-space form is the most numerically accurate, followed by the zero-pole-gain form. The transfer function coefficient form is the least accurate; numerical problems can arise for filter orders as low as 15.
besself uses a four-step algorithm:
Find lowpass analog prototype poles, zeros, and gain using the
besselapfunction.Convert the poles, zeros, and gain into state-space form.
Use the
lp2lpfunction to convert the continuous-time state-space lowpass filter prototype to a lowpass filter with the specified cutoff frequency.Convert the state-space filter back to transfer function or zero-pole-gain form, as required.
References
[1] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)