filtic
Initial conditions for transposed direct-form II filter implementation
Description
Examples
Zero Input Response for Past Input and Output
Determine the zero input response of the following system: with initial condition . Set the numerator and denominator coefficients and the initial conditions for the output.
b = [0.1 0.2]; a = [1 1.12]; Y = 1;
Calculate the zero input initial conditions for the system.
xic = filtic(b,a,Y);
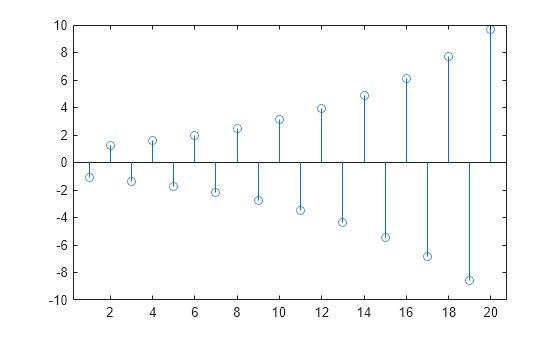
Compute the zero input response.
yzi = filter(b,a,zeros(1,20),xic); stem(yzi)
Input Arguments
Output Arguments
Algorithms
The filtic function performs a reverse difference equation to
obtain the delay states z. Elements of x beyond
x(n-1) and elements of y beyond
y(m-1) are unnecessary so filtic ignores them.
The transposed direct-form II structure is shown in this illustration, where n – 1 is the filter order.

References
[1] Oppenheim, A.V., and R.W. Schafer, Discrete-Time Signal Processing, Prentice-Hall, 1989, pp. 296, 301-302.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)