grpdelay
Average filter delay (group delay)
Syntax
Description
grpdelay(___) with no output arguments plots the
group delay response of the filter.
Examples
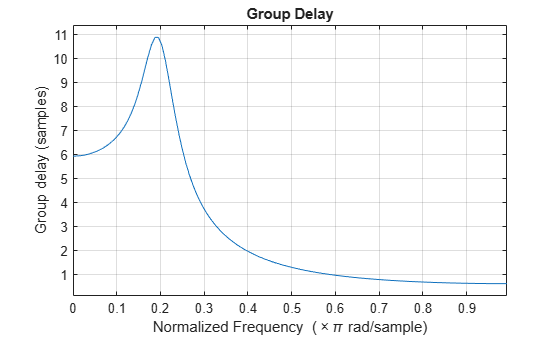
Group Delay of a Butterworth Filter
Design a Butterworth filter of order 6 with normalized 3-dB frequency rad/sample. Use grpdelay to display the group delay.
[z,p,k] = butter(6,0.2); sos = zp2sos(z,p,k); grpdelay(sos,128)
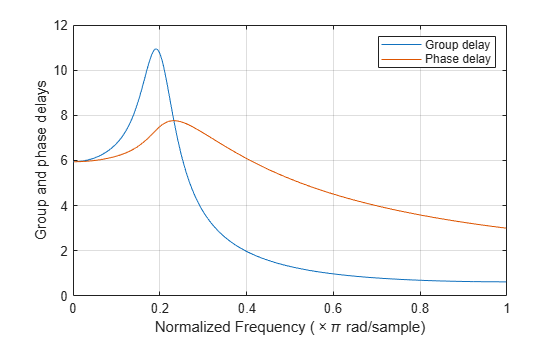
Plot both the group delay and the phase delay of the system on the same figure.
gd = grpdelay(sos,512); [h,w] = freqz(sos,512); pd = -unwrap(angle(h))./w; plot(w/pi,gd,w/pi,pd) grid xlabel 'Normalized Frequency (\times\pi rad/sample)' ylabel 'Group and phase delays' legend('Group delay','Phase delay')
Group Delay Response of a Butterworth digitalFilter
Use designfilt to design a sixth-order Butterworth Filter with normalized 3-dB frequency rad/sample. Display its group delay response.
d = designfilt('lowpassiir','FilterOrder',6, ... 'HalfPowerFrequency',0.2,'DesignMethod','butter'); grpdelay(d)

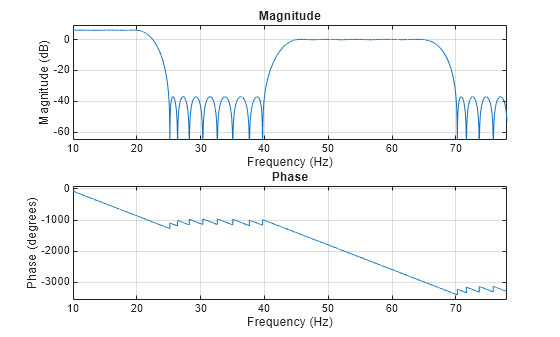
Group Delay Response of Arbitrary Magnitude Response FIR Filter
Design an 88th-order FIR filter of arbitrary magnitude response. The filter has two passbands and two stopbands. The lower-frequency passband has twice the gain of the higher-frequency passband. Specify a sample rate of 200 Hz. Visualize the magnitude response and the phase response of the filter from 10 Hz to 78 Hz.
fs = 200; d = designfilt('arbmagfir', ... 'FilterOrder',88, ... 'NumBands',4, ... 'BandFrequencies1',[0 20], ... 'BandFrequencies2',[25 40], ... 'BandFrequencies3',[45 65], ... 'BandFrequencies4',[70 100], ... 'BandAmplitudes1',[2 2], ... 'BandAmplitudes2',[0 0], ... 'BandAmplitudes3',[1 1], ... 'BandAmplitudes4',[0 0], ... 'SampleRate',fs); freqz(d,10:1/fs:78,fs)
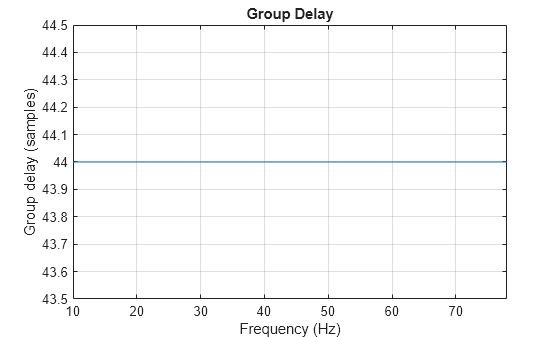
Compute and display the group delay response of the filter over the same frequency range. Verify that it is one-half of the filter order.
filtord(d)
ans = 88
grpdelay(d,10:1/fs:78,fs)
Input Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced before R2006aSee Also
Apps
Functions
cceps|designfilt|digitalFilter|fft|freqz|hilbert|icceps|phasedelay|rceps
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)