impzlength
Impulse response length
Description
len = impzlength(b,a)b,
and denominator, a, polynomials in z–1.
For stable IIR filters, len is the effective
impulse response sequence length. Terms in the IIR filter’s
impulse response after the len-th term are essentially
zero.
len = impzlength(sos)sos. sos is
a K-by-6 matrix, where the number of sections, K,
must be greater than or equal to 2. If the number of sections is less
than 2, impzlength considers the input to be
the numerator vector, b. Each row of sos corresponds
to the coefficients of a second order (biquad) filter. The ith
row of the sos matrix corresponds to [bi(1)
bi(2) bi(3) ai(1) ai(2) ai(3)].
len = impzlength(d)d.
Use designfilt to generate d based
on frequency-response specifications.
len = impzlength(___,tol)tol is 5e-5.
Increasing the value of tol estimates a shorter
effective length for an IIR filter’s impulse response. Decreasing
the value of tol produces a longer effective
length for an IIR filter’s impulse response.
Examples
IIR Filter Effective Impulse Response Length — Coefficients
Create a lowpass allpole IIR filter with a pole at 0.9. Calculate the effective impulse response length. Obtain the impulse response. Plot the result.
b = 1; a = [1 -0.9]; len = impzlength(b,a)
len = 93
[h,t] = impz(b,a); stem(t,h)
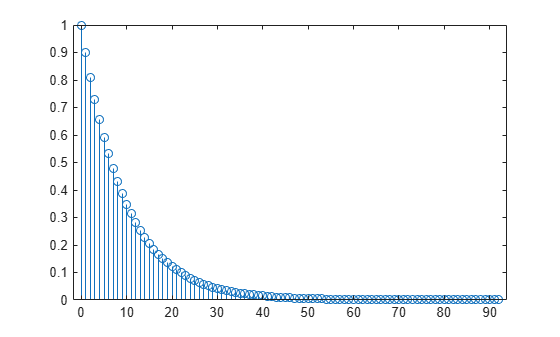
h(len)
ans = 6.1704e-05
IIR Filter Effective Impulse Response Length — Second-Order Sections
Design a 4th-order lowpass elliptic filter with a cutoff frequency of 0.4π rad/sample. Specify 1 dB of passband ripple and 60 dB of stopband attenuation. Design the filter in pole-zero-gain form and obtain the second-order section matrix using zp2sos. Determine the effective impulse response sequence length from the second-order section matrix.
[z,p,k] = ellip(4,1,60,.4); [sos,g] = zp2sos(z,p,k); len = impzlength(sos)
len = 80
IIR Filter Effective Impulse Response Length — Digital Filter
Use designfilt to design a 4th-order lowpass elliptic filter with normalized passband frequency 0.4π rad/sample. Specify 1 dB of passband ripple and 60 dB of stopband attenuation. Determine the effective impulse response sequence length.
d = designfilt("lowpassiir",FilterOrder=4,PassbandFrequency=0.4, ... PassbandRipple=1,StopbandAttenuation=60, ... DesignMethod="ellip"); len = impzlength(d)
len = 80
Input Arguments
Output Arguments
Algorithms
To compute the impulse response for an FIR filter, impzlength
uses the length of b. For IIR filters, the function first finds the
poles of the transfer function using roots.
If the filter is unstable, the length extends to the point at which the term from the largest pole reaches 106 times its original value.
If the filter is stable, the length extends to the point at which the term from the
largest-amplitude pole is tol times its original amplitude.
If the filter is oscillatory, with poles on the unit circle only, then
impzlength computes five periods of the slowest
oscillation.
If the filter has both oscillatory and damped terms, the length extends to the greater of these values:
Five periods of the slowest oscillation.
The point at which the term due to the largest pole is
toltimes its original amplitude.
Extended Capabilities
Version History
Introduced in R2013a
See Also
designfilt | digitalFilter | impz | zp2sos
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)