intfilt
Interpolation FIR filter design
Description
b = intfilt(l,p,alpha)2*p nonzero samples, when used on a sequence
interleaved with l-1 consecutive zeros every l
samples, assuming an original bandlimitedness of alpha times the
Nyquist frequency. The returned filter b is identical to that used by
interp.
b = intfilt(l,n,'Lagrange')nth-order Lagrange polynomial
interpolation on a sequence interleaved with l-1 consecutive zeros
every l samples.
Examples
Digital Interpolation Filter
Design a digital interpolation filter to upsample a signal by seven, using the bandlimited method. Specify a "bandlimitedness" factor of 0.5 and use samples in the interpolation.
upfac = 7; alpha = 0.5; h1 = intfilt(upfac,2,alpha);
The filter works best when the original signal is bandlimited to alpha times the Nyquist frequency. Create a bandlimited noise signal by generating 200 Gaussian random numbers and filtering the sequence with a 40th-order FIR lowpass filter. Reset the random number generator for reproducible results.
lowp = fir1(40,alpha);
rng('default')
x = filter(lowp,1,randn(200,1));Increase the sample rate of the signal by inserting zeros between each pair of samples of x.
xr = upsample(x,upfac);
Use the filter function to produce an interpolated signal.
y = filter(h1,1,xr);
Compensate for the delay introduced by the filter. Plot the original and interpolated signals.
delay = mean(grpdelay(h1));
y(1:delay) = [];
stem(1:upfac:upfac*length(x),x)
hold on
plot(y)
xlim([400 700])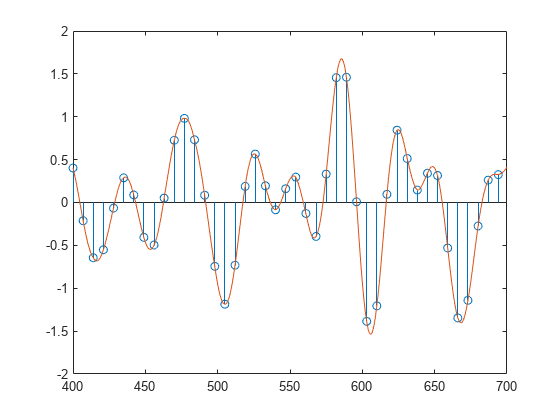
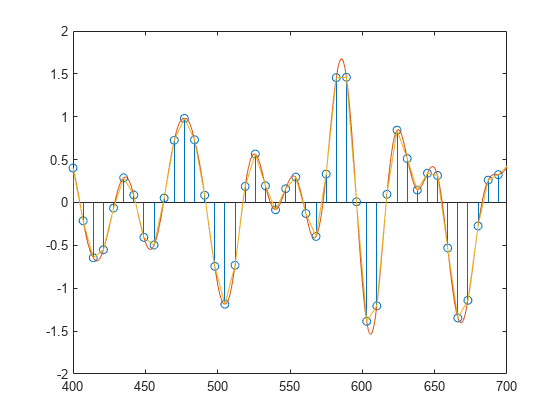
intfilt also performs Lagrange polynomial interpolation.
First-order polynomial interpolation is just linear interpolation, which is accomplished with a triangular filter.
Zeroth-order interpolation is accomplished with a moving average filter and resembles the output of a sample-and-hold display.
Interpolate the original signal and overlay the result.
h2 = intfilt(upfac,1,'Lagrange'); y2 = filter(h2,1,xr); y2(1:floor(mean(grpdelay(h2)))) = []; plot(y2) hold off
Input Arguments
Output Arguments
Algorithms
The bandlimited method uses firls to design an interpolation FIR filter. The
polynomial method uses Lagrange's polynomial interpolation formula on equally spaced samples
to construct the appropriate filter. Both types of filters are basically lowpass and have a
gain of l in the passband.
Extended Capabilities
Version History
Introduced before R2006a
See Also
decimate | downsample | interp | resample | upsample
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)