zerophase
Zero-phase response of digital filter
Syntax
Description
[
returns the zero-phase response Hr,w] = zerophase(b,a)Hr and the angular frequencies
w at which the zero-phase response is computed, given a filter
defined by numerator coefficients b and denominator coefficients
a. The function evaluates the zero-phase response at
512 equally spaced points on the upper half of the unit
circle.
[
returns the zero-phase response for the digital filter Hr,w] = zerophase(d)d. Use designfilt to generate d based on frequency-response
specifications.
zerophase(___) plots the
zero-phase response versus frequency. If you input the filter coefficients or second order
sections matrix, the function plots in the current figure window.
Note
If the input to zerophase is single precision, the function
calculates the zero-phase response using single-precision arithmetic. The output
Hr is single precision.
Examples
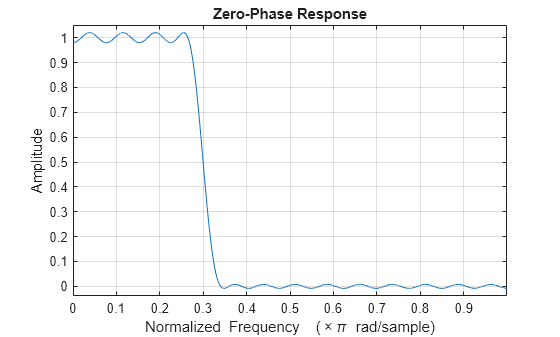
Zero-Phase Response of FIR Filter
Use designfilt to design a 54th-order FIR filter with a normalized cutoff frequency of 0.3π rad/sample, a passband ripple of 0.7 dB, and a stopband attenuation of 42 dB. Use the method of constrained least squares. Display the zero-phase response.
Nf = 54; Fc = 0.3; Ap = 0.7; As = 42; d = designfilt("lowpassfir",FilterOrder=Nf,CutoffFrequency=Fc, ... PassbandRipple=Ap,StopbandAttenuation=As,DesignMethod="cls"); zerophase(d)
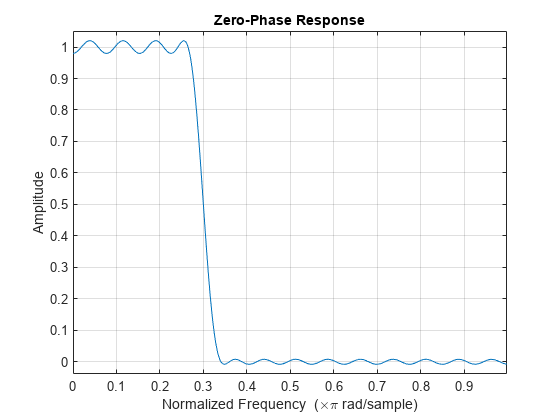
Design the same filter using fircls1, which uses linear units to measure the ripple and attenuation. Display the zero-phase response.
pAp = 10^(Ap/40); Apl = (pAp-1)/(pAp+1); pAs = 10^(As/20); Asl = 1/pAs; b = fircls1(Nf,Fc,Apl,Asl); zerophase(b)
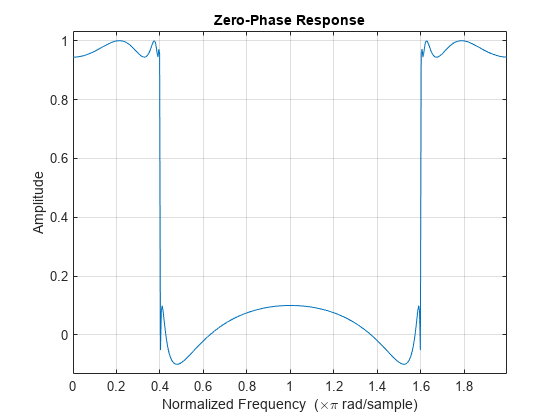
Zero-Phase Response of Elliptic Filter
Design a 10th-order elliptic lowpass IIR filter with a normalized passband frequency of 0.4π rad/sample, a passband ripple of 0.5 dB, and a stopband attenuation of 20 dB. Display the zero-phase response of the filter on 512 frequency points around the whole unit circle.
d = designfilt("lowpassiir",FilterOrder=10,PassbandFrequency=0.4, ... PassbandRipple=0.5,StopbandAttenuation=20,DesignMethod="ellip"); zerophase(d,512,"whole")
Create the same filter using ellip. Plot its zero-phase response.
[b,a] = ellip(10,0.5,20,0.4);
zerophase(b,a,512,"whole")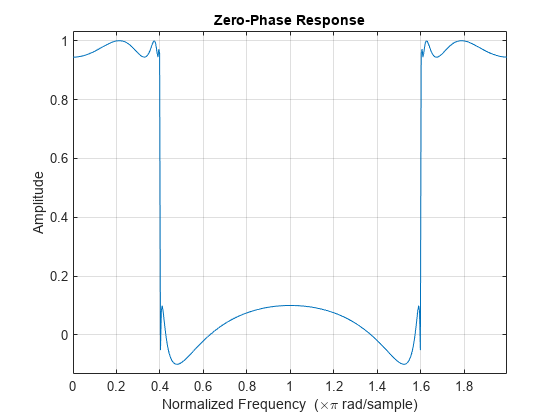
Input Arguments
Output Arguments
References
[1] Antoniou, Andreas. Digital Filters. New York: McGraw-Hill, Inc., 1993.
Version History
Introduced before R2006a
See Also
Apps
Functions
designfilt|digitalFilter|freqs|freqz|grpdelay|invfreqz|phasedelay|phasez
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)