zplane
Zero-pole plot for discrete-time systems
Description
zplane(
plots the zeros specified in column vector z,p)z and the poles
specified in column vector p in the current figure window.
The symbol 'o' represents a zero and the symbol
'x' represents a pole. The plot includes the unit circle
for reference.
If z and p are matrices, then
zplane plots the poles and zeros in the columns of
z and p in different
colors.
Examples
Poles and Zeros of Elliptic Lowpass Filter
For data sampled at 1000 Hz, plot the poles and zeros of a 4th-order elliptic lowpass digital filter with cutoff frequency 200 Hz, 3 dB of ripple in the passband, and 30 dB of attenuation in the stopband.
[z,p,k] = ellip(4,3,30,200/500);
zplane(z,p)
grid
title('4th-Order Elliptic Lowpass Digital Filter')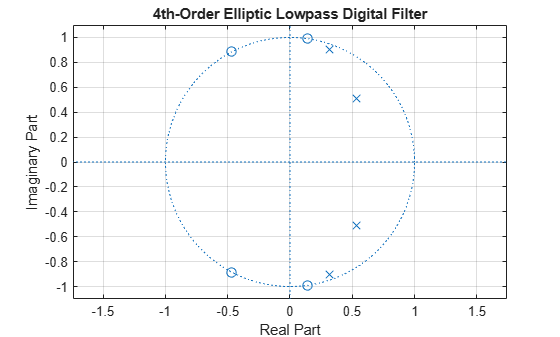
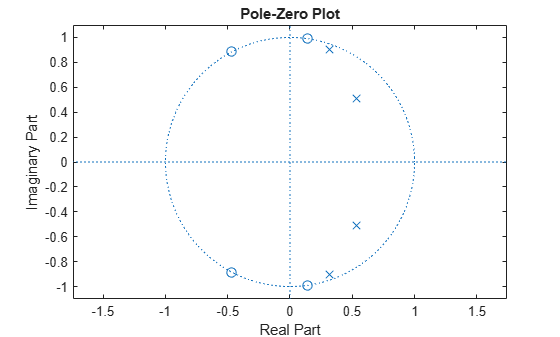
Create the same filter using designfilt. Use zplane to plot the poles and zeros.
d = designfilt('lowpassiir','FilterOrder',4,'PassbandFrequency',200, ... 'PassbandRipple',3,'StopbandAttenuation',30, ... 'DesignMethod','ellip','SampleRate',1000); zplane(d)
Zeros and Poles of Transfer Function
Design an 8th-order Chebyshev Type II bandpass filter with a stopband attenuation of 20 dB. Specify the stopband edge frequencies as rad/sample and rad/sample.
[b,a] = cheby2(8/2,20,[1 5]/8);
Use zplane to plot the poles and zeros of the transfer function.
zplane(b,a)
![]()
Visualize the zero-phase response of the filter. Overlay the unit circle and the pole and zero locations.
[hw,fw] = zerophase(b,a,1024,"whole"); z = roots(b); p = roots(a); plot3(cos(fw),sin(fw),hw) hold on plot3(cos(fw),sin(fw),zeros(size(fw)),'--') plot3(real(z),imag(z),zeros(size(z)),'o') plot3(real(p),imag(p),zeros(size(p)),'x') hold off xlabel("Real") ylabel("Imaginary") view(35,40) grid
![]()
Input Arguments
Output Arguments
Tips
You can override the automatic scaling of
zplaneusingaxis([xmin xmax ymin ymax])
after calling
zplane. This scaling is useful when one or more zeros or poles have such a large magnitude that the others are grouped tightly around the origin and are hard to distinguish.
Version History
Introduced before R2006aSee Also
Apps
Functions
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)