Discrete Transfer Fcn
Implement discrete transfer function
Libraries:
Simulink /
Discrete
HDL Coder /
Discrete
HDL Coder /
HDL Floating Point Operations
Description
The Discrete Transfer Fcn block implements the z-transform transfer function as follows:
where m+1 and n+1 are the number of numerator and denominator coefficients, respectively. num and den contain the coefficients of the numerator and denominator in descending powers of z. num can be a vector or matrix, while den must be a vector. The order of the denominator must be greater than or equal to the order of the numerator.
Specify the coefficients of the numerator and denominator polynomials in descending powers of z. This block lets you use polynomials in z to represent a discrete system, a method that control engineers typically use. Conversely, the Discrete Filter block lets you use polynomials in z-1 (the delay operator) to represent a discrete system, a method that signal processing engineers typically use. The two methods are identical when the numerator and denominator polynomials have the same length.
The Discrete Transfer Fcn block applies the z-transform transfer function to each independent channel of the input. The Input processing parameter allows you to specify whether the block treats each column of the input as an individual channel (frame-based processing) or each element of the input as an individual channel (sample-based processing). To perform frame-based processing, you must have a DSP System Toolbox™ license.
Specifying Initial States
Use the Initial states parameter to specify the initial filter states. The initial states you specify are the initial conditions of the unit delay blocks that are used in the filter digram implementing the discrete transfer function.
To determine the number of initial states you must specify and how to specify them, use the following tables.
Frame-Based Processing
| Input | Number of Channels | Valid Initial States (Dialog Box) | Valid Initial States (Input Port) |
|---|---|---|---|
| 1 |
|
|
| N |
|
|
Sample-Based Processing
| Input | Number of Channels | Valid Initial States (Dialog Box) | Valid Initial States (Input Port) |
|---|---|---|---|
| 1 |
|
|
| N |
|
|
| K × N |
|
|
When the Initial states is a scalar, the block initializes all filter
states to the same scalar value. To initialize all states to zero, enter
0. When the Initial states is a vector
or a matrix, each vector or matrix element specifies a unique initial state for a
corresponding delay element in a corresponding channel:
The vector length must equal the number of delay elements in the filter,
M = max(number of zeros, number of poles).The matrix must have the same number of rows as the number of delay elements in the filter,
M = max(number of zeros, number of poles). The matrix must also have one column for each channel of the input signal.
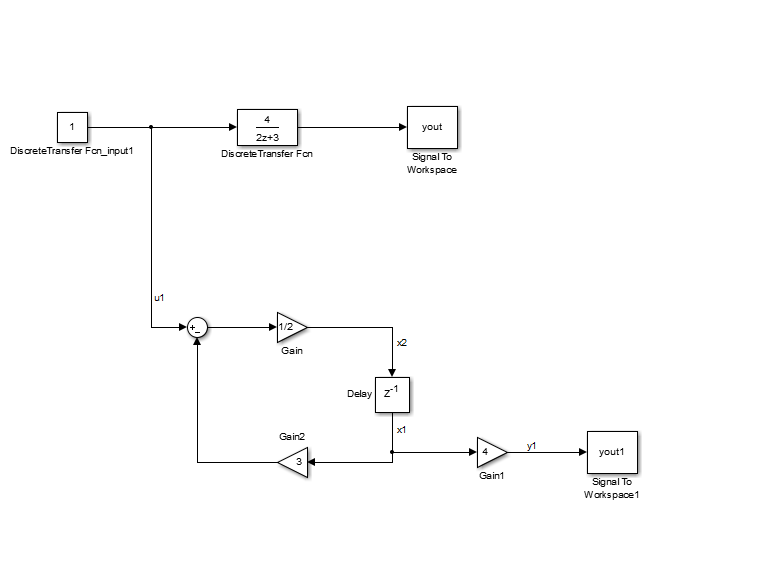
The following example shows the relationship between the initial filter output and the initial input and state. Given an initial input u1, the first output y1 is related to the initial state [x1, x2] and initial input by as follows:
Ports
Input
Output
Parameters
Main
Numerator Source — Source of numerator coefficients
Dialog (default) | Input port
Specify the source of the numerator coefficients as
Dialog or Input
port.
Programmatic Use
Block Parameter:
NumeratorSource |
| Type: character vector |
Values:
'Dialog' | 'Input port' |
Default:
'Dialog'
|
Numerator Value — Numerator coefficients
[1] (default) | scalar | vector | matrix
Numerator coefficients of the discrete transfer function. To specify the coefficients,
set the Source to
Dialog. Then, enter the coefficients in
Value as descending powers of
z. Use a row vector to specify the coefficients
for a single numerator polynomial. Use a matrix to specify coefficients
for multiple filters to be applied to the same input. Each matrix row
represents a set of filter taps.
Dependencies
To enable this parameter, set the Numerator
Source to Dialog.
Programmatic Use
Block Parameter:
Numerator |
| Type: character vector |
| Values: scalar | vector | matrix |
Default:
'[1]'
|
Denominator Source — Source of denominator coefficients
Dialog (default) | Input port
Specify the source of the denominator coefficients as
Dialog or Input
port.
Programmatic Use
Block Parameter:
DenominatorSource |
| Type: character vector |
Values:
'Dialog' | 'Input port' |
Default:
'Dialog'
|
Denominator Value — Denominator coefficients
[1 0.5] (default) | scalar | vector | matrix
Denominator coefficients of the discrete transfer function. To specify
the coefficients, set the Source to
Dialog. Then, enter the coefficients in
Value as descending powers of
z. Use a row vector to specify the coefficients
for a single denominator polynomial. Use a matrix to specify
coefficients for multiple filters to be applied to the same input. Each
matrix row represents a set of filter taps.
Dependencies
To enable this parameter, set the Denominator
Source to Dialog.
Programmatic Use
Block Parameter:
Denominator |
| Type: character vector |
| Values: scalar | vector | matrix |
Default:
'[1 0.5]'
|
Initial states Source — Source of initial states
Dialog (default) | Input port
Specify the source of the initial states as
Dialog or Input
port.
Programmatic Use
Block Parameter:
InitialStatesSource |
| Type: character vector |
Values:
'Dialog' | 'Input port' |
Default:
'Dialog'
|
Initial states Value — Initial filter states
0 (default) | scalar | vector | matrix
Specify the initial filter states as a scalar, vector, or matrix. To learn how to specify initial states, see Specifying Initial States.
Dependencies
To enable this parameter, set Initial states
Source to Dialog.
Programmatic Use
Block Parameter:
InitialStates |
| Type: character vector |
| Values: scalar | vector | matrix |
Default:
'0'
|
External reset — External state reset
None (default) | Rising | Falling | Either | Level | Level hold
Specify the trigger event to use to reset the states to the initial conditions.
| Reset Mode | Behavior |
|---|---|
None | No reset |
Rising | Reset on a rising edge |
Falling | Reset on a falling edge |
Either | Reset on either a rising or falling edge |
Level | Reset in either of these cases:
|
Level hold | Reset when the reset signal is nonzero at the current time step |
Programmatic Use
Block Parameter:
ExternalReset |
| Type: character vector |
Values: 'None' |
'Rising' | 'Falling' |
'Either' | 'Level' | 'Level
hold' |
Default: 'None' |
Input processing — Sample- or frame-based processing
Elements as channels (sample
based) (default) | Columns as channels (frame based)
Specify whether the block performs sample- or frame-based processing.
Elements as channels (sample based)— Process each element of the input as an independent channel.Columns as channels (frame based)— Process each column of the input as an independent channel.Note
Frame-based processing requires a DSP System Toolbox license.
For more information, see Sample- and Frame-Based Concepts (DSP System Toolbox).
Programmatic Use
Block Parameter:
InputProcessing |
| Type: character vector |
Values:
'Elements as channels (sample based)' | 'Columns as
channels (frame based)' |
Default:
'Elements as channels (sample
based)' |
Optimize by skipping divide by leading denominator coefficient (a0) — Skip divide by a0
off (default) | on
Select when the leading denominator coefficient, a0, equals 1. This parameter optimizes your code.
When you select this check box, the block does not perform a divide-by-a0 either in simulation or in the generated code. An error occurs if you specify the denominator coefficients in the block dialog box and a0 ≠ 1.
When you clear this check box, the block is fully tunable during simulation, and performs a divide-by-a0 in both simulation and code generation.
Programmatic Use
Block Parameter:
a0EqualsOne
|
| Type: character vector |
Values:
'off' | 'on' |
Default:
'off'
|
Sample time (-1 for inherited) — Interval between samples
-1 (default) | scalar | vector
Specify the time interval between samples. To inherit the sample time, set this
parameter to -1. For more information, see Specify Sample Time.
Dependencies
This parameter is visible only if you set it to a value other than
-1. To learn more, see Blocks for Which Sample Time Is Not Recommended.
Programmatic Use
Block Parameter:
SampleTime |
| Type: string scalar or character vector |
Default:
"-1" |
Data Types
State — State data type
Inherit: Same as input (default) | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>
Specify the state data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Same as inputA built-in integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
StateDataTypeStr
|
| Type: character vector |
Values:
'Inherit: Same as input' | 'int8' | 'int16' | 'int32' |
'int64' | 'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Same as input'
|
Numerator coefficients — Numerator coefficient data type
Inherit: Inherit via internal
rule (default) | int8 | int16 | int32 | int64 | fixdt(1,16) | fixdt(1,16,0) | <data type expression>
Specify the numerator coefficient data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
NumCoefDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'int8' | 'int16'
| 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' |
'<data type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Numerator coefficient minimum — Minimum value of numerator coefficients
[] (default) | scalar
Specify the minimum value that a numerator coefficient can have. The
default value is [] (unspecified). Simulink® software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
NumCoefMin |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Numerator coefficient maximum — Maximum value of numerator coefficients
[] (default) | scalar
Specify the maximum value that a numerator coefficient can have. The
default value is [] (unspecified). Simulink software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
NumCoefMax |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Numerator product output — Numerator product output data type
Inherit: Inherit via internal
rule (default) | Inherit: Same as input | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>
Specify the product output data type for the numerator coefficients. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
NumProductDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'int8' | 'int16' | 'int32' | 'int64' |
'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Inherit via internal rule' |
Numerator accumulator — Numerator accumulator data type
Inherit: Inherit via internal
rule (default) | Inherit: Same as input | Inherit: Same as product output | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>
Specify the accumulator data type for the numerator coefficients. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
NumAccumDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'Inherit: Same as product output' | 'int8' |
'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data
type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Denominator coefficients — Denominator coefficient data type
Inherit: Inherit via internal
rule (default) | int8 | int16 | int32 | int64 | fixdt(1,16) | fixdt(1,16,0) | <data type expression>
Specify the denominator coefficient data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
DenCoefDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'int8' | 'int16'
| 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' |
'<data type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Denominator coefficient minimum — Minimum value of denominator coefficients
[] (default) | scalar
Specify the minimum value that a denominator coefficient can have. The
default value is [] (unspecified). Simulink software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
DenCoefMin |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Denominator coefficient maximum — Maximum value of denominator coefficients
[] (default) | scalar
Specify the maximum value that a denominator coefficient can have. The
default value is [] (unspecified). Simulink software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
DenCoefMax |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Denominator product output — Denominator product output data type
Inherit: Inherit via internal
rule (default) | Inherit: Same as input | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>
Specify the product output data type for the denominator coefficients. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
DenProductDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'int8' | 'int16' | 'int32' | 'int64' |
'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Inherit via internal rule' |
Denominator accumulator — Denominator accumulator data type
Inherit: Inherit via internal
rule (default) | Inherit: Same as input | Inherit: Same as product output | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>
Specify the accumulator data type for the denominator coefficients. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
DenAccumDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'Inherit: Same as product output' | 'int8' |
'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data
type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Output — Output data type
Inherit: Inherit via internal
rule (default) | Inherit: Same as input | int8 | int16 | int32 | int64 | fixdt(1,16) | fixdt(1,16,0) | <data type expression>
Specify the output data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
OutDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'int8' | 'int16' | 'int32' | 'int64' |
'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Inherit via internal rule' |
Output minimum — Minimum value of output
[] (default) | scalar
Specify the minimum value that the block can output. The default value
is [] (unspecified). Simulink uses this value to perform:
Simulation range checking (see Specify Signal Ranges)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
OutMin |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Output maximum — Maximum value of output
[] (default) | scalar
Specify the maximum value that the block can output. The default value
is [] (unspecified). Simulink uses this value to perform:
Simulation range checking (see Specify Signal Ranges)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
OutMax |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Lock data type settings against changes by the fixed-point tools — Prevent fixed-point tools from overriding data types
off (default) | on
Select this parameter to prevent the fixed-point tools from overriding the data types you specify on this block. For more information, see Lock the Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
Block Parameter: LockScale |
| Type: character vector |
Values: 'off' | 'on' |
Default: 'off' |
Integer rounding mode — Rounding mode for fixed-point operations
Floor (default) | Ceiling | Convergent | Nearest | Round | Simplest | Zero
Specify the rounding mode for fixed-point operations. For more information, see Rounding (Fixed-Point Designer).
Block parameters always round to the nearest representable value. To control the rounding of a block parameter, enter an expression using a MATLAB® rounding function into the mask field.
Programmatic Use
Block Parameter:
RndMeth |
| Type: character vector |
Values:
'Ceiling' | 'Convergent' | 'Floor' | 'Nearest' | 'Round' | 'Simplest' |
'Zero' |
Default:
'Floor' |
Saturate on integer overflow — Method of overflow action
off (default) | on
Specify whether overflows saturate or wrap.
| Action | Rationale | Impact on Overflows | Example |
|---|---|---|---|
|
Select this check box ( |
Your model has possible overflow, and you want explicit saturation protection in the generated code. |
Overflows saturate to either the minimum or maximum value that the data type can represent. |
The maximum value that the |
|
Do not select this check box ( |
You want to optimize efficiency of your generated code. You want to avoid overspecifying how a block handles out-of-range signals. For more information, see Troubleshoot Signal Range Errors. |
Overflows wrap to the appropriate value that is representable by the data type. |
The maximum value that the |
When you select this check box, saturation applies to every internal operation on the block, not just the output, or result. Usually, the code generation process can detect when overflow is not possible. In this case, the code generator does not produce saturation code.
Programmatic Use
Block Parameter: SaturateOnIntegerOverflow |
| Type: character vector |
Values:
'off' | 'on' |
Default: 'off' |
State Attributes
State name — Unique name for block state
'' (default) | alphanumeric string
Use this parameter to assign a unique name to the block state. The default is ' '. When this field is blank, no name is assigned. When using this parameter, remember these considerations:
A valid identifier starts with an alphabetic or underscore character, followed by alphanumeric or underscore characters.
The state name applies only to the selected block.
This parameter enables State name must resolve to Simulink signal object when you click Apply.
For more information, see C Data Code Interface Configuration for Model Interface Elements (Simulink Coder).
Programmatic Use
Block Parameter: StateName |
| Type: character vector |
| Values: unique name |
Default: '' |
State name must resolve to Simulink signal object — Require state name resolve to a signal object
off (default) | on
Select this check box to require that the state name resolves to a Simulink signal object.
Dependencies
To enable this parameter, specify a value for State name. This parameter appears only if you set the model configuration parameter Signal resolution to a value other than None.
Programmatic Use
Block Parameter: StateMustResolveToSignalObject |
| Type: character vector |
Values:
'off' | 'on' |
Default: 'off' |
Block Characteristics
Extended Capabilities
Version History
Introduced before R2006aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)