Transport Delay
Delay input by given amount of time
Libraries:
Simulink /
Continuous
Description
The Transport Delay block delays the input by a specified amount of time. You can use this block to simulate a time delay. The input to this block should be a continuous signal.
At the start of simulation, the block outputs the Initial output parameter until the simulation time exceeds the Time delay parameter. Then, the block begins generating the delayed input. During simulation, the block stores input points and simulation times in a buffer. You specify this size with the Initial buffer size parameter.
When you want output at a time that does not correspond to times of the stored input values, the block interpolates linearly between points. When the delay is smaller than the step size, the block extrapolates from the last output point, which can produce inaccurate results. Because the block does not have direct feedthrough, it cannot use the current input to calculate an output value. For example, consider a fixed-step simulation with a step size of 1 and the current time at t = 5. If the delay is 0.5, the block must generate a point at t = 4.5. Because the most recent stored time value is at t = 4, the block performs forward extrapolation.
The Transport Delay block does not interpolate discrete signals. Instead, the block returns the discrete value at the required time.
This block differs from the Unit Delay block, which delays and holds the output on sample hits only.
Tip
Avoid using linmod to linearize a model that contains a Transport
Delay block. For more information, see Linearizing Models.
Examples
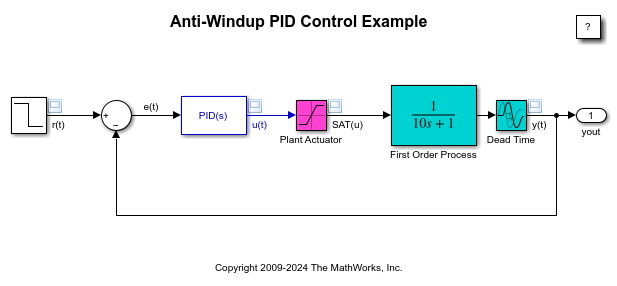
Anti-Windup Control Using PID Controller Block
Use anti-windup schemes to prevent integration wind-up in PID controllers when the actuators are saturated. The PID Controller block in Simulink® features two built-in anti-windup methods, back-calculation and clamping, as well as a tracking mode to handle more complex industrial scenarios. The PID Controller block supports several features that allow it to handle controller windup issues under commonly encountered industrial scenarios.
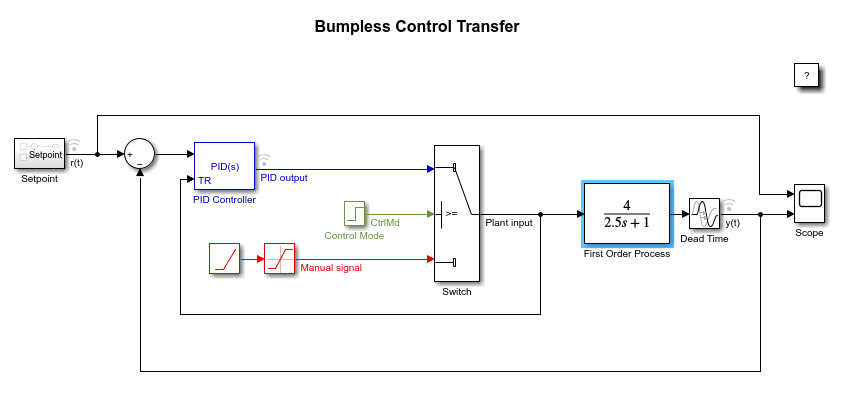
Bumpless Control Transfer Between Manual and PID Control
Achieve bumpless control transfer when switching from manual control to proportional integral derivative (PID) control. The model uses the PID Controller block in Simulink® to control a first-order process with dead-time.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Extended Capabilities
Version History
Introduced before R2006a