Get Started with Simulink Control Design
Simulink® Control Design™ lets you design and analyze control systems modeled in Simulink. You can automatically tune arbitrary SISO and MIMO control architectures, including PID controllers. PID autotuning can be deployed to embedded software for automatically computing PID gains in real time. You can also implement active disturbance rejection control, extremum-seeking control, and model reference adaptive control for applications where the controller must adapt to changing plant and disturbance dynamics.
You can find operating points and compute exact linearizations of Simulink models at various operating conditions. Simulink Control Design provides tools that let you compute simulation-based frequency responses without modifying your model.
Tutorials
- Compute Operating Points from Specifications Using Steady State Manager
Find steady-state operating points that meet specifications by trimming your Simulink model using the Steady State Manager app.
- Linearize Simulink Model at Model Operating Point
Linearize a model at its operating point consisting of initial state values and input signals.
- Trim and Linearize Simulink Models
This example shows how to programmatically linearize a watertank Simulink Model feedback control system.
- Estimate Frequency Response Using Model Linearizer
Estimate the frequency response of a Simulink model using a manually constructed sinestream input signal.
- PID Controller Tuning in Simulink
You can tune the gains of PID Controller blocks to achieve a robust design with the desired response time using PID Tuner.
- Design Compensator Using Automated PID Tuning and Graphical Bode Design
Automatically tune the parameters of a PID controller. You can then fine tune the controller performance using graphical design techniques.
- Verify Model Using Simulink Control Design and Simulink Verification Blocks
Assert that linear system characteristics satisfy specified bounds using a combination of Simulink Control Design and Simulink verification blocks.
Interactive Learning
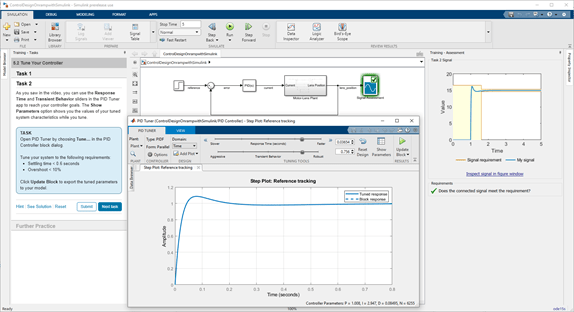
Control Design Onramp with Simulink
Free, self-paced, interactive Simulink
Control Design course
Videos
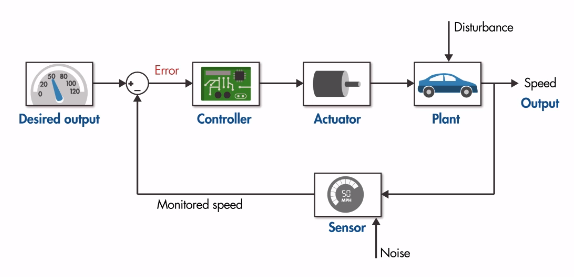
Understanding Control Systems — MATLAB Tech Talks
Walk through everyday examples that explore the fundamentals of open-loop and
feedback control systems.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)