linio
Create linear analysis point for Simulink model, Linear Analysis Plots block, or Model Verification block
Description
Examples
Create Analysis Points for Simulink Model
Open Simulink model.
open_system('magball')
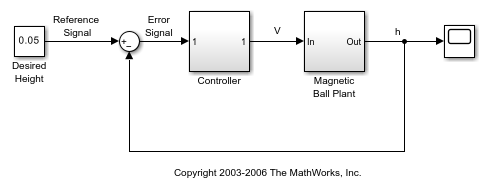
To specify multiple analysis points for linearization, create a vector of linearization I/O objects.
Create an input perturbation analysis point at the output port of the Controller block.
io(1) = linio('magball/Controller',1);
Create an open-loop output analysis point at the output of the Magnetic Ball Plant block. An open-loop output point is an output measurement followed by a loop opening.
io(2) = linio('magball/Magnetic Ball Plant',1,'openoutput');
View the specified analysis points.
io
1x2 vector of Linearization IOs: -------------------------- 1. Linearization input perturbation located at the following signal: - Block: magball/Controller - Port: 1 2. Linearization open-loop output located at the following signal: - Block: magball/Magnetic Ball Plant - Port: 1
You can use these analysis points to linearize only the Magnetic Ball Plant subsystem. To do so, pass io to the linearize command or to an slLinearizer interface.
Unlike specifying analysis points directly in the Simulink model, when you create analysis points using linio, no annotations are added to the model.
Select Individual Bus Element as Analysis Point
Open Simulink model.
mdl = 'scdbusselection';
open_system(mdl)
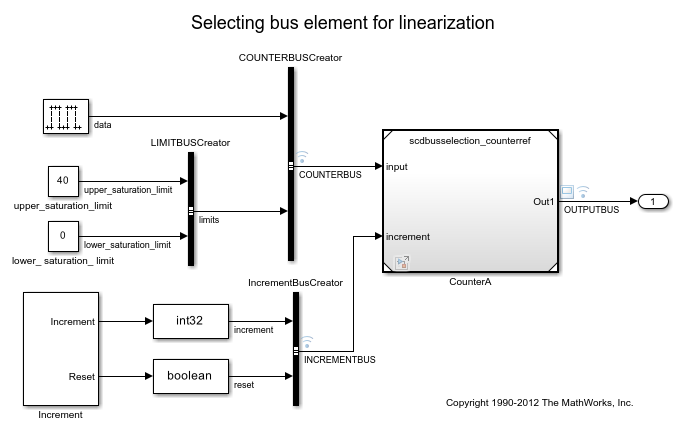
The COUNTERBUS signal, which originates from the COUNTERBUSCreator block, contains multiple bus elements.
Specify the upper_saturation_limit bus element as a linearization input. Select this element using dot notation, since it is within the nested limits bus.
io = linio('scdbusselection/COUNTERBUSCreator',1,'input',[],... 'limits.upper_saturation_limit');
Input Arguments
Output Arguments
Alternative Functionality
Model Linearizer
You can interactively configure analysis points using the Model Linearizer. For more information see, Specify Portion of Model to Linearize in Model Linearizer.
Simulink Model
You can also specify analysis points directly in a Simulink model. When you do so, the analysis points are saved within the model. For more information, see Specify Portion of Model to Linearize in Simulink Model.
slLinearizer and slTuner Interfaces
If you want to obtain multiple open-loop or closed-loop transfer
functions from the linearized system without recompiling the model,
you can specify linear analysis points using an slLinearizer interface. For more information,
see Mark Signals of Interest for Batch Linearization. Similarly,
if you want to tune a control system and obtain multiple open-loop
or closed-loop transfer functions from the resulting system, you can
specify linear analysis points using an slTuner interface.
For more information, see Mark Signals of Interest for Control System Analysis and Design.
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)