DC Motor Controller Tuning
This example shows how to design a PI control system to control the speed of a DC motor. It is based on the Control System Toolbox™ DC Motor Control (Control System Toolbox) example.
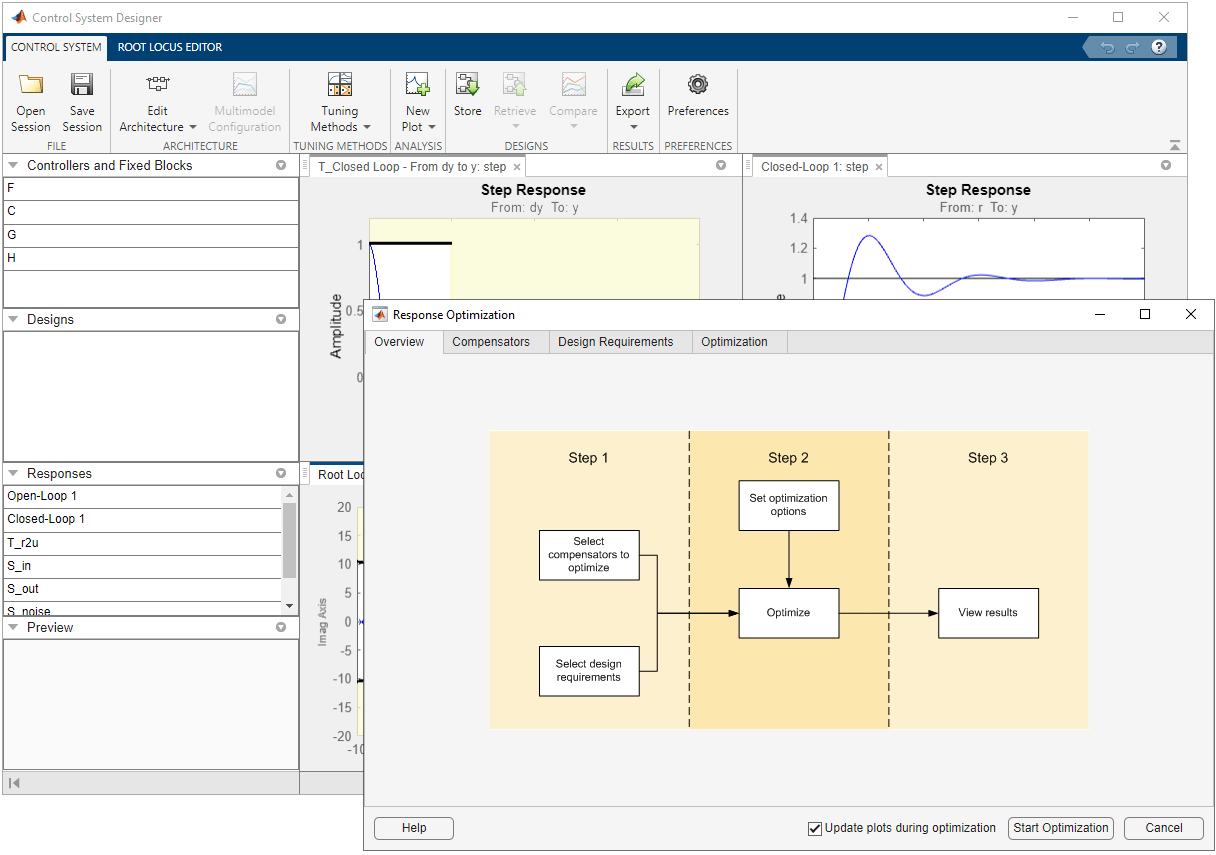
After loading the model and pre-configured Control System Designer, you can design a new controller using Response Optimization.
Requires Control System Toolbox™.
Opening the Model and Control System Designer
Open the model and pre-configured Control System Designer using the command
controlSystemDesigner('dcmotor_demoproject')
Design Overview
The goal of the overall design is to track a reference change in speed with minimal overshoot and to reject output disturbances. The controller must satisfy the following requirements:
The closed-loop poles of the control loop are restricted to a region on the root locus plot that implies less than a 5% overshoot.
The closed-loop poles of the control loop are restricted to a region on the root locus plot that implies a settling time less than 2 seconds.
The output (y) of a unit step output disturbance is reduced by 80% within 0.5 seconds and by 95% within 1 second.
These design requirements have been added to the Control System Designer. To complete the design, using response optimization, click the Start Optimization button within the Response Optimization dialog.
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)