estimateFundamentalMatrix
Estimate fundamental matrix from corresponding points in stereo images
Syntax
Description
estimateFundamentalMatrix estimates the
fundamental matrix from corresponding points in stereo images. This
function can be configured to use all corresponding points or to exclude
outliers. You can exclude outliers by using a robust estimation technique
such as random-sample consensus (RANSAC). When you use robust estimation,
results may not be identical between runs because of the randomized
nature of the algorithm.
F = estimateFundamentalMatrix(matchedPoints1,matchedPoints2)F, using the least
median of squares (LMedS) method from matched feature points in stereo
images.
[ additionally
returns logical indices, F,inliersIndex]
= estimateFundamentalMatrix(matchedPoints1,matchedPoints2)inliersIndex, for the
inliers used to compute the fundamental matrix. The inliersIndex output
is an M-by-1 vector. The function sets the elements
of the vector to true when the corresponding point
was used to compute the fundamental matrix. The elements are set to false if
they are not used.
[ additionally
returns a status code.F,inliersIndex,status]
= estimateFundamentalMatrix(matchedPoints1,matchedPoints2)
[
specifies options using one or more name-value arguments in addition to any
combination of arguments from previous syntaxes. For example,
F,inliersIndex,status]
= estimateFundamentalMatrix(matchedPoints1,matchedPoints2,Name=Value)estimateFundamentalMatrix(
specifies MSAC as the method to compute the fundamental matrix.matchedPoints1,matchedPoints2,Method="MSAC")
Examples
Compute Fundamental Matrix
Use the random sample consensus (RANSAC) method to compute the fundamental matrix. The RANSAC method requires that the input points are putatively matched. You can use the matchFeatures function to return these matched points. Outlier points which may still be contained within putatively matched points are further eliminated by using the RANSAC algorithm.
Load stereo points into the workspace.
load stereoPointPairsEstimate the fundamental matrix.
fRANSAC = estimateFundamentalMatrix(matchedPoints1, ... matchedPoints2,Method="RANSAC", ... NumTrials=2000,DistanceThreshold=1e-4)
fRANSAC = 3×3
0.0000 -0.0004 0.0348
0.0004 0.0000 -0.0937
-0.0426 0.0993 0.9892
Use Least Median of Squares Method to Find Inliers
Load the putatively matched points into the workspace.
load stereoPointPairs
[fLMedS,inliers] = estimateFundamentalMatrix(matchedPoints1,matchedPoints2,NumTrials=2000)fLMedS = 3×3
0.0000 -0.0004 0.0349
0.0004 0.0000 -0.0938
-0.0426 0.0994 0.9892
inliers = 18x1 logical array
1
1
1
1
1
1
0
1
0
0
⋮
Load the stereo images.
I1 = imread("viprectification_deskLeft.png"); I2 = imread("viprectification_deskRight.png");
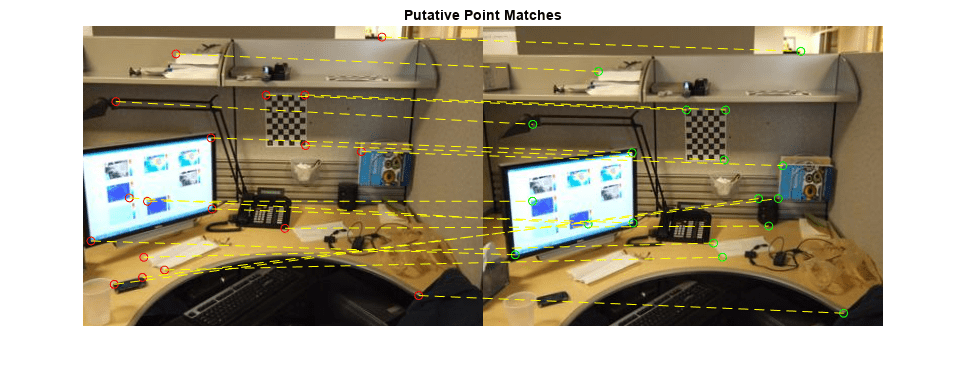
Show the putatively matched points.
figure; showMatchedFeatures(I1,I2,matchedPoints1,matchedPoints2,"montage",PlotOptions=["ro","go","y--"]); title("Putative Point Matches");
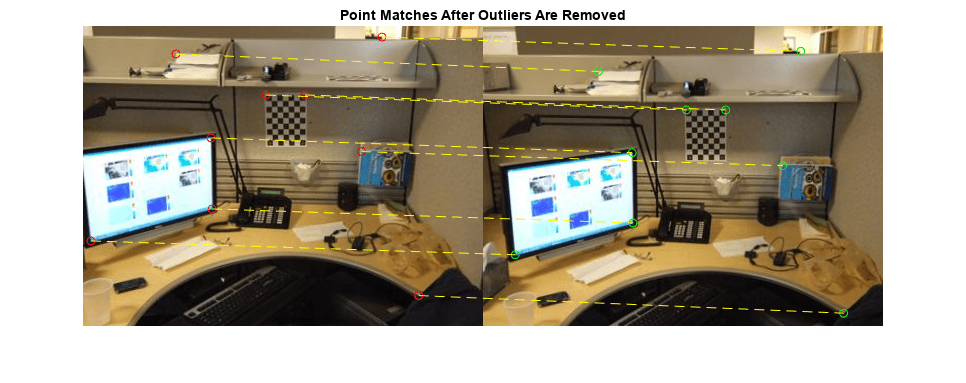
Show the inlier points.
figure; showMatchedFeatures(I1,I2,matchedPoints1(inliers,:),matchedPoints2(inliers,:),"montage",PlotOptions=["ro","go","y--"]); title("Point Matches After Outliers Are Removed");
Use Normalized Eight-Point Algorithm to Compute Fundamental Matrix
Load the stereo point pairs into the workspace.
load stereoPointPairsCompute the fundamental matrix for input points which do not contain any outliers.
inlierPts1 = matchedPoints1(knownInliers,:);
inlierPts2 = matchedPoints2(knownInliers,:);
fNorm8Point = estimateFundamentalMatrix(inlierPts1,inlierPts2,Method="Norm8Point")fNorm8Point = 3×3
0.0000 -0.0004 0.0348
0.0004 0.0000 -0.0937
-0.0426 0.0993 0.9892
Input Arguments
Output Arguments
Tips
Use estimateEssentialMatrix when
you know the camera intrinsics. You can obtain the intrinsics using
the Camera Calibrator app.
Otherwise, you can use the estimateFundamentalMatrix function
that does not require camera intrinsics. Note that the fundamental
matrix cannot be estimated from coplanar world points.
Algorithms
References
[1] Hartley, R., A. Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2003.
[2] Rousseeuw, P., A. Leroy, Robust Regression and Outlier Detection, John Wiley & Sons, 1987.
[3] Torr, P. H. S., and A. Zisserman, MLESAC: A New Robust Estimator with Application to Estimating Image Geometry, Computer Vision and Image Understanding, 2000.
Extended Capabilities
Version History
Introduced in R2012b
See Also
Functions
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)