Hough Lines
Find Cartesian coordinates of lines described by rho and theta pairs
Libraries:
Computer Vision Toolbox /
Transforms
Description
The Hough Lines block finds the points of intersection between the boundary lines of a reference image and a line specified as a rho-theta pair. The block outputs Cartesian coordinates for the points of intersection. The boundary lines indicate the left and right vertical boundaries and the top and bottom horizontal boundaries of the reference image.
If the line specified by a rho-theta pair does not intersect two border lines in the
reference image, the block outputs the values, [0 0 0 0] for that line.
This output value enables the next block in your model to ignore the outputs for that line, as
the Hough Lines block generally precedes a block that draws a point or shape at
each output intersection.
Examples
Ports
Input
Output
Pts — Intersection points
matrix
Intersection points, returned as an M-by-4 matrix of coordinate values, where M is the number of input lines.
For example, consider a Hough Lines block with two-element vectors as the theta and rho inputs, describing two lines.
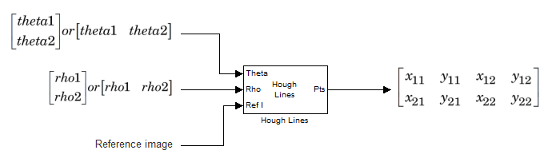
The block outputs a 2-by-4 matrix, in which each row consists of two xy-pairs of coordinates that describe the points at which the corresponding line intersects with the boundary lines of the reference image.
[x11 y11
x12 y12;
x21 y21
x22 y22]
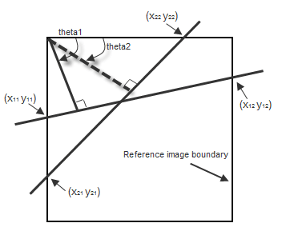
This figure shows the line described by the first rho-theta pair intersecting the
boundaries of the reference image at [x11
y11 x12
y12] and the line described by the second pair
intersecting the boundaries at [x21
y21 x22
y22].
Data Types: int32
Parameters
Block Characteristics
Data Types | |
Multidimensional Signals |
|
Variable-Size Signals |
|
a This data type is only supported at the input port Ref1. b Generated code will be restricted to MATLAB host computers when you set the FFT implementation parameter to FFTW, or when the transform length is not a power of two. c Input ports Theta and Rho support signed fixed-point data types with word lengths less than or equal to 32, while Ref1 supports signed and unsigned fixed-point data types. d The output port supports 32-bit signed integers only. Input ports Theta and Rho support signed integers, while Ref1 supports signed and unsigned integers. | |
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)