isEpipoleInImage
Determine whether image contains epipole
Syntax
Description
Examples
Input Arguments
Output Arguments
isIn — Valid epipole
logical
Valid epipole logical, specified as true when the image contains
an epipole, and false when the image does not contain an
epipole.
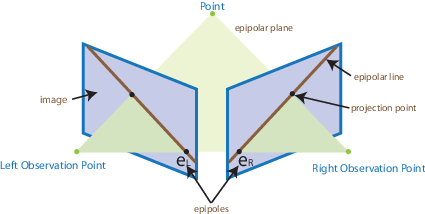
When the image planes are at a great enough angle to each other, you can expect the epipole to be located in the image.
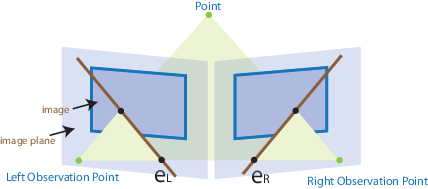
When the image planes are at a more subtle angle to each other, you can expect the epipole to be located outside of the image, (but still in the image plane).
epipole — Location of epipole
1-by-2 vector
Location of epipole, returned as a 1-by-2 vector.
Extended Capabilities
Version History
Introduced in R2011a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)